
本系列教程作者:小鱼 公众号:鱼香ROS QQ交流群:139707339 教学视频地址:小鱼的B站 完整文档地址:鱼香ROS官网 版权声明:如非允许禁止转载与商业用途。 
大家好,我是可爱的小鱼 。本节小鱼带你一起学习使用Python将李四节点中小写说timer周期变成一个可以动态修改的参数。
1.代码编写打开vscode,打开li4.py,把目光放到下面这行代码上
class WriterNode(Node)
这行程序告诉我们,WriterNode是继承于rclpy.node.Node的。所以李四获取到了参数相关的能力:
函数名称描述declare_parameter声明和初始化一个参数declare_parameters声明和初始化一堆参数get_parameter通过参数名字获取一个参数get_parameters通过多个参数名字获取多个参数set_parameters设置一组参数的值更多函数Node — rclpy 0.6.1 documentation (ros2.org)完成修改李四编写速度的参数,我们需要做两步即可,声明参数和获取参数
1.1 声明参数修改__init__函数,最后面加入下面这行代码
# 声明参数,参数名字,默认值
self.declare_parameter("write_timer_period",5
这里我们在timer的回调函数里做这件事,每次写完小说就更新一下
修改timer_callback函数,在最下面加入两行代码
# 回调之后更新回调周期
timer_period = self.get_parameter('write_timer_period').get_parameter_value().integer_value
# 更新回调周期
self.timer.timer_period_ns = timer_period * (1000*1000*1000)
完整的代码如下:
def timer_callback(self):
msg = String()
msg.data = '第%d回:潋滟湖 %d 次偶遇胡艳娘' % (self.i,self.i)
self.write.publish(msg) #将小说内容发布出去
self.get_logger().info('李四:我发布了艳娘传奇:"%s"' % msg.data) #打印一下发布的数据,供我们看
self.i += 1 #章节编号+1
# 回调之后更新回调周期
timer_period = self.get_parameter('write_timer_period').get_parameter_value().integer_value
# 更新回调周期
self.timer.timer_period_ns = timer_period * (1000*1000*1000)
稍微解释一下,新增的两行代码一个用于获取目前的参数值通过参数名称,并将其转换成整形数据
另外一行用于更新回调的周期(修改timer的成员变量timer_period_ns即可实现)
2.测试 2.1编译程序colcon build --packages-select village_li
ros2 run village_li li4_node
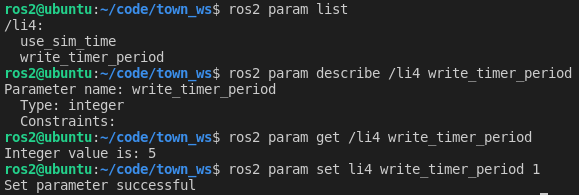
ros2 param list
ros2 param describe /wang2 novel_price

ros2 param get /wang2 novel_price

这里设置成1,让李四一秒钟写完一章.
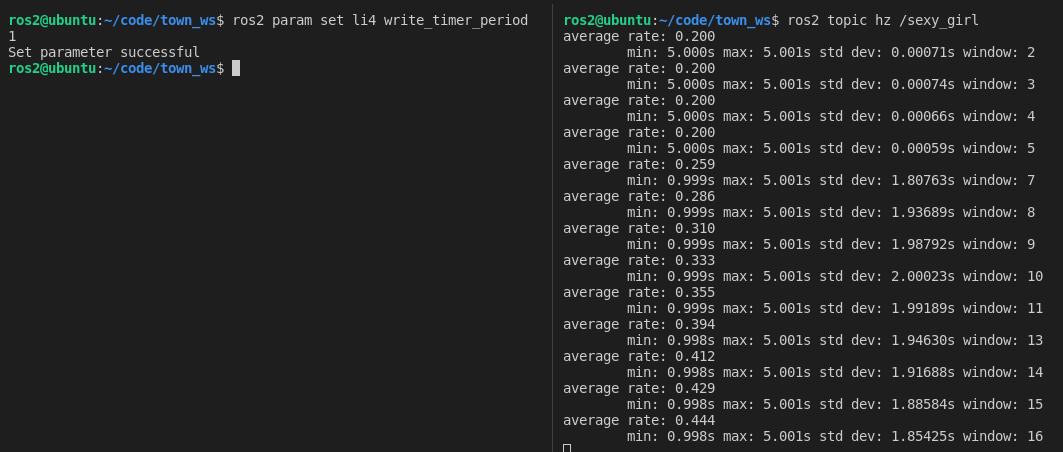
ros2 param set li4 write_timer_period 1
有的小伙伴说,我怎么知道李四有没有变得更快了,这里小鱼再讲一个非常牛🍹的命令行工具ros2 topic hz
ros2 topic hz /sexy_girl
这个指令可以让我们看到话题的发布频率信息。
对比一下设置之前和设置之后的速率,明显加快了。
这里留一个小思考,我们设置的周期是5,为什么这里的rate是0.200,后面我们把周期改成了1,为什么rate会一直增大?
通过本节使用Python对参数进行操作,相信和小鱼一样可爱的你已经掌握了在Python节点中使用参数的方法。下一节小鱼带你一起在C++节点使用参数。
参考文档:Node — rclpy 0.6.1 documentation (ros2.org)
作者介绍:我是小鱼,机器人领域资深玩家,现深圳某独脚兽机器人算法工程师一枚 初中学习编程,高中开始接触机器人,大学期间打机器人相关比赛实现月入2W+(比赛奖金) 目前在输出机器人学习指南、论文注解、工作经验,欢迎大家关注小智,一起交流技术,学习机器人

