
本系列教程作者:小鱼 公众号:鱼香ROS QQ交流群:139707339 教学视频地址:小鱼的B站 完整文档地址:鱼香ROS官网 版权声明:如非允许禁止转载与商业用途。
写在前面- 当前平台文章汇总地址:ROS2机器人从入门到实战
- 获取完整教程及配套资料代码,请关注公众号获取
- 教程配套机器人开发平台:两驱版| 四驱版
- 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn
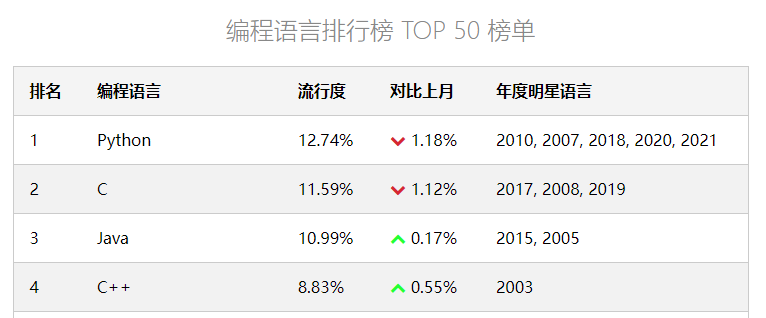
做机器人最常用的两门语言就是C++和Python,同时这两门语言也是编程语言流行度排行榜数一数二的。
听说牛逼的大佬都用记事本写代码,这节小鱼带你在Linux版记事本之gedit上写一下C++和Python代码。
1.Hello FishRos 1.1 Python版打开终端,创建一个d2lros2文件夹接着在文件夹下创建chapt1文件夹。
mkdir d2lros2
cd d2lros2
mkdir chapt1
接着输入下面的指令打开gedit并创建文件
gedit hello_fishros.py
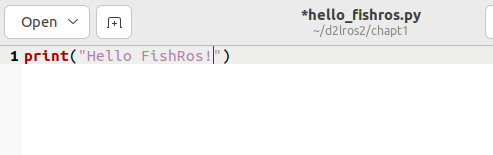
接着你应该看到一个类似于记事本的东西,在里面输入下面一段代码,打印一句话
print("Hello FishRos!")
使用Ctrl+S保存代码
关掉gedit,接着在终端输入下面的指令运行这段脚本
python3 hello_fishros.py
如果一切正常,你将看到

接着我们来学习C++版本的打印一句话。
进入终端,用gedit再次编辑一个叫做hello_fishros.cpp的文件。
cd d2lros2/chapt1/
gedit hello_fishros.cpp
输入下面的内容
#include"iostream"
int main(){
std::cout
关注
打赏
最近更新
- 深拷贝和浅拷贝的区别(重点)
- 【Vue】走进Vue框架世界
- 【云服务器】项目部署—搭建网站—vue电商后台管理系统
- 【React介绍】 一文带你深入React
- 【React】React组件实例的三大属性之state,props,refs(你学废了吗)
- 【脚手架VueCLI】从零开始,创建一个VUE项目
- 【React】深入理解React组件生命周期----图文详解(含代码)
- 【React】DOM的Diffing算法是什么?以及DOM中key的作用----经典面试题
- 【React】1_使用React脚手架创建项目步骤--------详解(含项目结构说明)
- 【React】2_如何使用react脚手架写一个简单的页面?

