基于ROS2多机器人编程资料
鱼香ROS介绍:
鱼香ROS是由机器人爱好者共同组成的社区,欢迎一起参与机器人技术交流。 进群加V:fishros2048
文章信息:
标题:基于ROS2多机器人编程资料 原文地址:https://fishros.org.cn/forum/topic/21 关键词: 参与者: 小鱼, 版权声明: 文章中所有知识产权归鱼香ROS及原作者所有。
1. 小鱼笑嘻嘻的说: 基于ROS2多机器人编程资料- 推荐语:基于ROS2的多机器人
- 地址:https://osrf.github.io/ros2multirobotbook/intro.html
欢迎!这是一本关于多机器人系统的书。为什么?因为这是未来!
机器人在许多“现实生活”场景中变得更实惠、更有能力和更有用。因此,我们看到越来越多的机器人需要共享空间并协同工作以完成任务。在本书中,我们将介绍机器人操作系统 2 (ROS 2) 以及基于 ROS 2 构建的机器人中间件框架 (RMF),它试图简化复杂多机器人系统的创建和操作。
本章描述了 ROS 2 和 RMF 系统集成多个机器人的动机和目标。
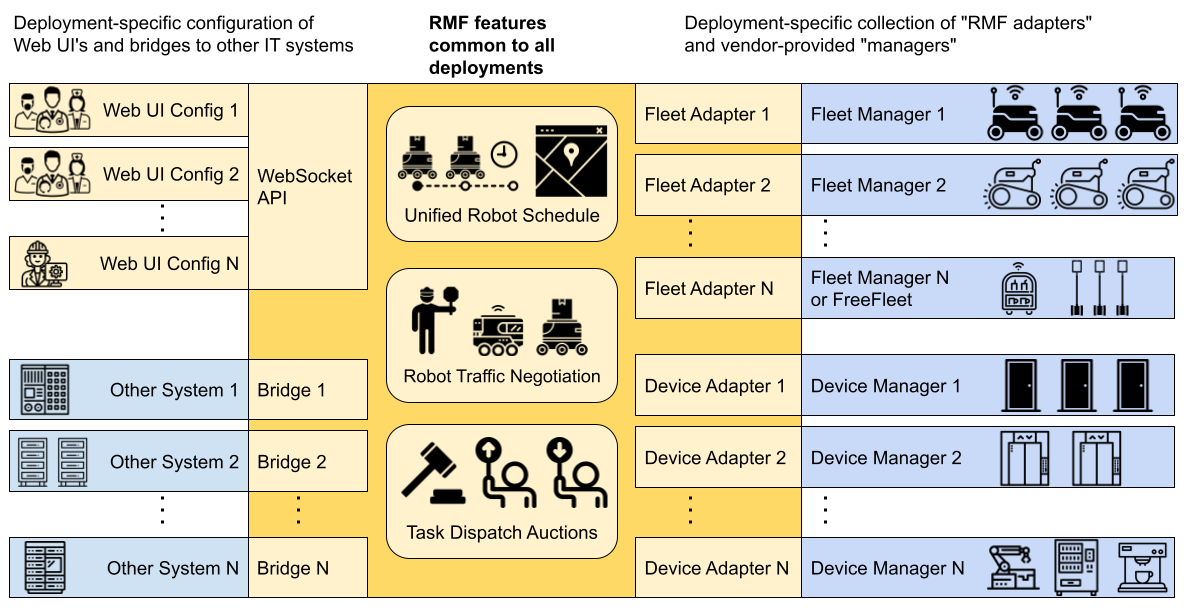
RMFRMF 是在 ROS 2 之上构建的可重用、可扩展库和工具的集合,可实现任何类型机器人系统的异构车队的互操作性。RMF 将标准化通信协议用于部署机器人的基础设施、环境和自动化,以优化关键资源(即机器人、电梯、门、通道等)的使用。它通过资源分配和通过 RMF 核心防止共享资源的冲突为系统增加了智能,这将在本书后面详细描述。
RMF 足够灵活和强大,几乎可以在任何通信层上运行并与任意数量的 IOT 设备集成。RMF 的体系结构的设计方式允许随着环境中自动化水平的提高而扩展。系统和用户可以通过多种方式通过 API 和可定制的用户界面与 RMF 进行交互。一旦在环境中部署,RMF 将通过允许共享资源和最小化集成来节省成本。这是机器人开发人员和机器人客户一直在寻找的东西。简而言之,这里是 RMF: