常见问题之安装ROS功能包时提示找不到
鱼香ROS介绍:
鱼香ROS是由机器人爱好者共同组成的社区,欢迎一起参与机器人技术交流。 进群加V:fishros2048
文章信息:
标题:常见问题之安装ROS功能包时提示找不到 原文地址:https://fishros.org.cn/forum/topic/74 关键词: 参与者: 小鱼, 版权声明: 文章中所有知识产权归鱼香ROS及原作者所有。
1. 小鱼听着歌说:有鱼粉问经常因为某一些功能包安装时找不到,来问小鱼原因,比如在ubuntu20上安装cartographer这个包。
如果你使用下面这条指令肯定会报错
sudo apt install ros-neotic-cartographer
原因时什么呢?
很简单,作者没有打包发布这个包的二进制安装文件,通过ROS的官网就可以查知。 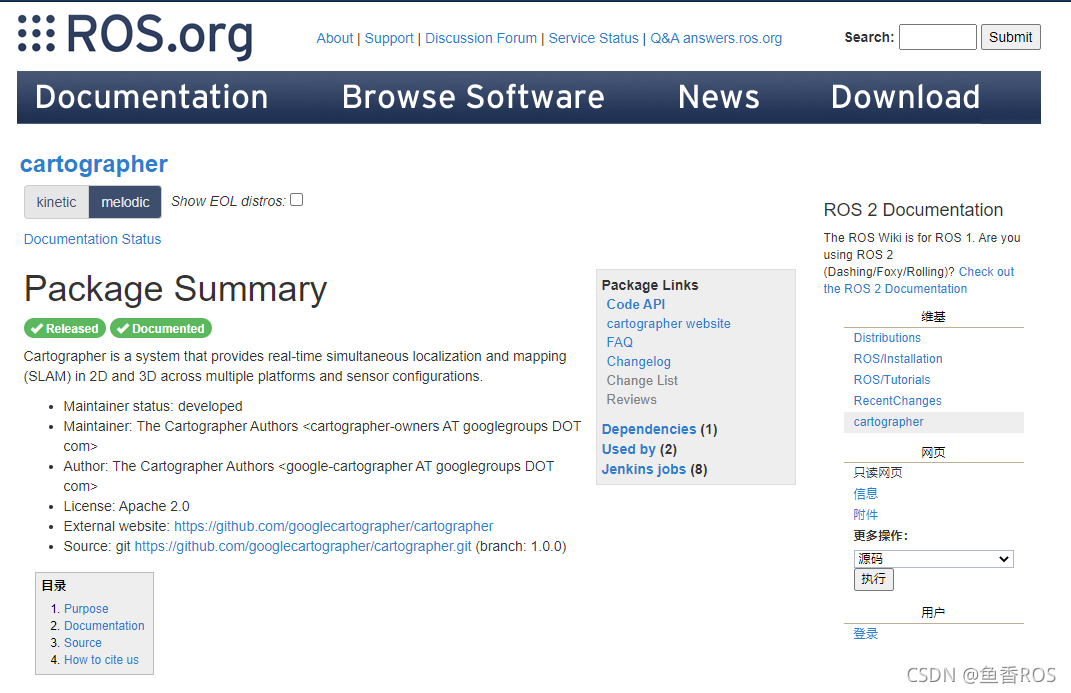
那该怎么办呢?
功能包的获取一般有两种方式。
1. 安装获取安装一般使用
sudo apt install ros--package_name
手动编译相对麻烦一些,需要下载源码然后进行编译生成相关文件。
什么时候需要手动编译呢?一般我们能安装的功能包都是作者编译好程序将可执行文件上传到仓库中,然后我们才能够通过apt进行安装,如果作者还没来得及测试上传,或者忘记了测试上传,就会找不到对应的包,这时候就需要手动编译安装了。
另外一种就是我们需要对包的源码进行修改,这个时候也需要自己编译修改。
手动编译之后,需要手动source工作空间目录。
所以我们可以根据wiki上所给出的git地址,使用git clone ,下载源码,编译安装(记得切换分支哦)


