
功能说明:
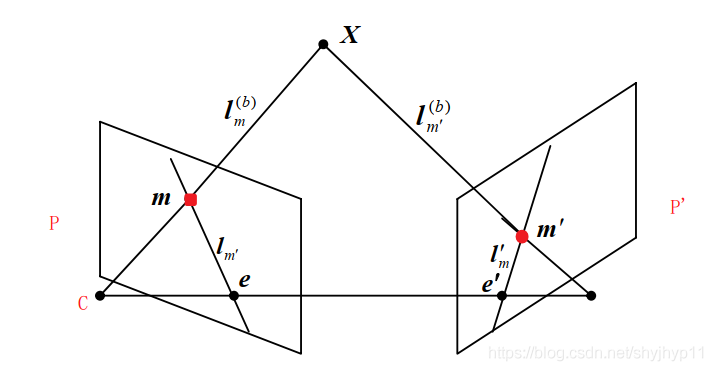
- 输入: 图像i上的点m, 图像点m在该图像坐标系下的深度, 图像i(2维的)对应的相机坐标系(3维的) 到 图像j对应的相机坐标系 之间的变换Tji
- 输出: 图像j上与图像m对应的点m’
//其中: mK为相机的内参, mKinv 为相机内参的逆. // 对应的点是否在图像平面内,在本函数中未判断,使用时需要先确定在图像界限内
def get_correspondence_v(point_u, d_u, Tji):
"""
find corre
