
SLAM中为什么使用逆深度(深度的倒数)误差而不是深度误差?
参考1:逆深度可以用来降低 较远的深度点(视差应该越小)造成的误差,这样做更符合精度的表达。
举个例子就明白了:因为自然场景物体深度本身变化很大,比如50m和100m,它们的视差其实很小,可能体现在图像里只有一两个像素,但是如果直接用深度值表达的话差距是 100 -50 = 50,如果用逆深度表达的话是 1/50 - 1/100 = 0.01,相对50是个非常小的数值,符合定义能量最小化函数。
参考2:- 采用逆深度参数表达的BA问题导数推导
由于大部分的slam算法均采用逆深度参数表达地图点的结构。逆深度参数表达具有优化变量少、能表达非常远的点以及分布接近高斯分布等优势,这也是大家选择逆深度参数的原因。
参考3:特征点在归一化相机坐标系与在相机坐标系下的坐标关系为:
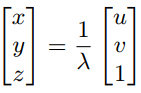
其中 λ = 1/z 称为逆深度。
关注
打赏
最近更新
- 深拷贝和浅拷贝的区别(重点)
- 【Vue】走进Vue框架世界
- 【云服务器】项目部署—搭建网站—vue电商后台管理系统
- 【React介绍】 一文带你深入React
- 【React】React组件实例的三大属性之state,props,refs(你学废了吗)
- 【脚手架VueCLI】从零开始,创建一个VUE项目
- 【React】深入理解React组件生命周期----图文详解(含代码)
- 【React】DOM的Diffing算法是什么?以及DOM中key的作用----经典面试题
- 【React】1_使用React脚手架创建项目步骤--------详解(含项目结构说明)
- 【React】2_如何使用react脚手架写一个简单的页面?

