
目录
1. 三维重建概述
2. 现有系统简要对比
2.1 VisualSFM
2.2 Meshlab
2.3 Colmap
2.4 Bundler
2.5 CMVS
2.6 MVE
2.7 MVS-Texturing
2.8 OpenMVG
2.9 OpenMVS
1. 三维重建概述我们知道,照相机/摄像机的原理是将一个三维场景或物体投影到二维平面上,过去是胶片,现在是经过感光元件再记录到存储器。降维的过程通常不可避免地会存在信息的损失,而所谓的重建(Reconstruction),顾名思义就是要从获取到的二维图像中复原原始三维场景或物体。
相对照相机的诞生,三维重建的概念本身说年轻也算年轻;但相比从2012年开始比较火的深度学习、神经网络等概念,三维重建也算是古老的研究领域了,因为第一个基于图像的三维重建系统诞生于1992年(CMU的Tomasi等人的工作)。
三维重建的流程大致如下:
- 首先,通过多角度拍摄或者从视频中提取得到一组图像序列,将这些图像序列作为整个系统的输入;
- 随后,在多视角的图像中,根据纹理特征提取出稀疏特征点(称为点云),通过这些特征点估计相机位置和参数;
- 在得到相机参数并完成特征点匹配后,我们就可以获得更稠密的点云(这些点可以附带颜色,从远处看就像还原了物体本身一样,但从近处能明显看出它们只是一些点);
- 最后根据这些点重建物体表面,并进行纹理映射,就还原出三维场景和物体了。
概括起来就是:图像获取->特征匹配->深度估计->稀疏点云->相机参数估计->稠密点云->表面重建->纹理映射
目前已有不少免费系统(部分系统已开源)能够完成三维重建的整个流程,在深入研读某一个系统的代码之前,我决定先根据前人资料横向比较一下这些系统的异同。除了亲自运行了几个系统外,主要参考了这个视频的讲解(需要科学上网),以下内容的部分截图也出自这里。感谢视频原作者和以下每个系统的创造者。
2. 现有系统简要对比以下对比图,相比原文有改动。

图中从左至右的过程依次是从原始图像到稀疏点云、重建稠密点云、重建表面和纹理映射。对应列的绿色代表该系统具备此功能,白色反之。
2.1 VisualSFMA Visual Structure from Motion System
- 是否开源:否
- 文档:小规模 (5k词左右)
- 兼容性:兼容OS X/Windows/Linux
- 主要特性:完成从图像到稠密点云的重建过程,值得注意的是,VSFM系统的输出可以放入CMP-MVS(Multi-View Reconstruction Preserving Weakly-Supported Surfaces, CVPR 2011),MVE(by Michael Goesele’s research group),SURE(by Mathias Rothermel and Konrad Wenzel), MeshRecon(by Zhuoliang Kang)等系统中进行后处理(如稠密重建)。
视频中展示的稠密点云精度比较高,但构建速度较慢(讲解者在重构一个人形塑像时用了1小时40分钟)。

配置相关
VisualSFM下载官网:http://ccwu.me/vsfm/
CMVS-PMVS下载:https://github.com/pmoulon/CMVS-PMVS
配置:将下载好的文件解压,把toolkit\PMVS2\binariesWin-Linux\Win64-VS2010下的所有文件,全部拷贝到与VisualSFM.exe的相同根目录(toolkit\VisualSFM_windows_cuda_64bit)下即可使用,VisualSFM在运算过程中会自动使用PMVS/CMVS。
2.2 Meshlabthe open source system for processing and editing 3D triangular meshes.
- 是否开源:是
- 文档:无详细文档,但有视频教程
- 兼容性:兼容OS X/Windows/Linux
- 主要特性:从稠密点云进行表面重建,并完成纹理映射。
- 附加:可选取感兴趣的区域(Region of Interest, ROI)进行编辑,比如降低面片数量、删除区域外的稀疏点等。
- 此外,诸多其他系统的点云结果可在本系统内查看。(下图红色区域为用户选择的非感兴趣区域,可进行删除)

a general-purpose Structure-from-Motion (SfM) and Multi-View Stereo (MVS) pipeline with a graphical and command-line interface.
- 是否开源:是
- 文档:有详细说明,共13章节
- 兼容性:兼容OS X/Windows/Linux
- 主要特性:输入多视角图像,输出稀疏点云并估计相机参数,后续步骤需基于CUDA实现。采用Patch Match的信息传递策略,采用GEM进行深度估计。
- 实际体验效果:

可见重建精度还是不错的,并且整体操作上比较快。
2.4 BundlerStructure from Motion (SfM) for Unordered Image Collections
- 是否开源:是
- 文档:小规模(5k词左右),无详细接口说明
- 兼容性:虽然已发布windows版本,但开发和测试主要集中在Linux平台
- 主要特性:输入多视角图像,输出稀疏点云并估计相机参数,与Colmap类似,视频显示在实际处理中Bundler速度更快(30-40min)。虽然精度和点云密度不如colmap和visualSFM高,但本系统可以计算相机参数,因此可放入下面的CMVS系统中进行后处理。
下图为bundler处理后的结果(在meshlab中查看),能够明显看到点云密度不高。

Clustering Views for Multi-view Stereo
- 是否开源:是
- 文档:小规模,无接口说明
- 兼容性:有windows版本,linux为命令行版本
- 主要特性:将SfM系统的输出(稀疏点云)作为本系统的输入,本系统可将输入图像分解成一组可管理大小的图像集群。之后可以使用MVS软件独立并且并行地处理每个集群。本系统应该与SfM软件(例如Bundler)和MVS软件(例如PMVS2)结合使用。
不过视频作者的例子中,bundler的输出放在本系统中作为输入可能会存在问题,使用时还需注意。(下图为meshlab中查看的处理结果,细节丢失较严重)

CMVS是PMVS的改进版,(里面包含PMVS)是Yasutaka Furukama博士写的已知一组图片和图片对应的相机参数生成dense reconstruction (稠密的三维模型)。
- CMVS 对影像进行聚簇,以减少数据量;
- PMVS (the patch-based MVS algorithm)方案负责重建稠密点云、重建表面和纹理映射;通过匹配、膨胀、过滤三个步骤,利用稀疏重建结果将其向空间周围扩散得到有向点云;通过增强光度一致性和满足全局可见性约束两个条件下,完成稠密匹配。
a complete end-to-end pipeline for image-based geometry reconstruction.
- 是否开源:是
- 文档:中等规模,有示例,有管线说明。
- 兼容性:windows/OS X均可运行,文档说更推荐用OS X系统。
- 主要特性:包含了SfM, 点云重建,表面重建。基本上能够完成三维重建的整个流程。
- 实际体验:已编译运行,未进行完整操作流程。下图为MVE的用户界面
3D Reconstruction Texturing
- 是否开源:是
- 文档:小规模,有用法说明。
- 兼容性:命令行程序
- 主要特性:能够完成大规模图像输入的纹理映射。特别是能够在缩放、模糊、遮挡物、曝光变化的情况下完成高质量的纹理映射。最后的效果比较干净

open Multiple View Geometry
是否开源:是
文档:大规模,分8个章节。
兼容性:三大平台
主要功能:精确解决多视图几何中的常见问题;保证代码可读性和易用性。负责从原始图像到稀疏点云。
2.9 OpenMVSopen Multi-View Stereo reconstruction library
是否开源:是
文档:中等规模,分5节,逻辑比较顺畅。
兼容性:三大平台均可编译
主要功能:稠密点云重建、表面重建、表面细化、纹理映射。(输入是一组相机姿态加上稀疏点云,输出是一个纹理网格)
- 1、dense point-cloud reconstruction
- 2、mesh reconstruction
- 3、mesh refinement
- 4、mesh texturing
值得注意的是表面细化(mesh refinement)这一步,是其他系统中比较少见的,效果如下:

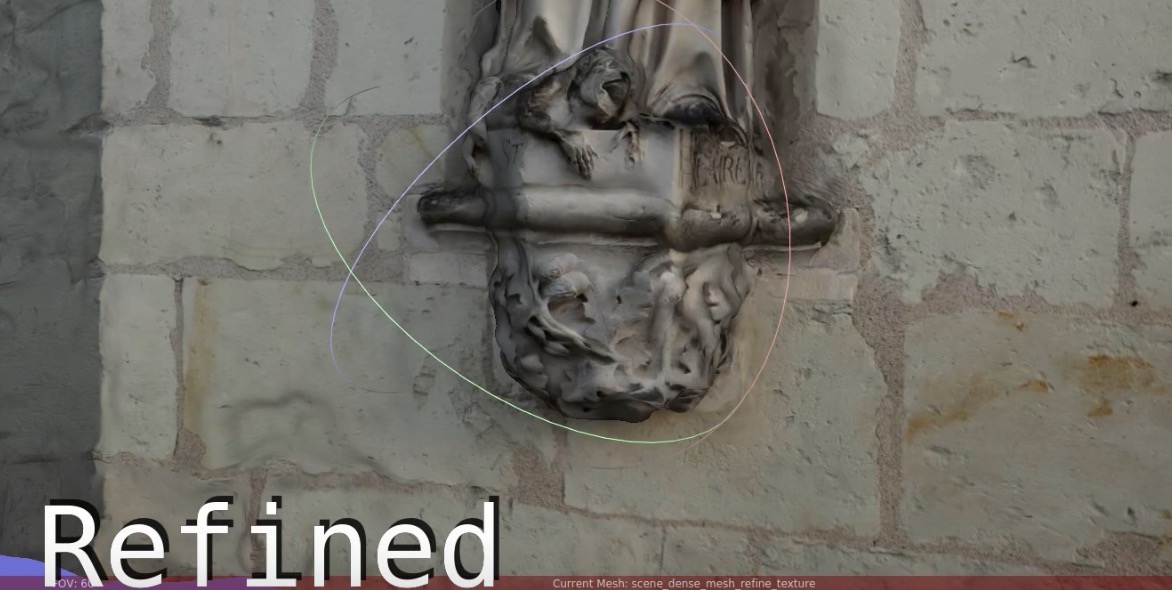
虽然OpenMVS和上面的OpenMVG并不是同一个团队所作,但这两个系统恰好一起完成了三维重建的整个流程,可以协同使用。
小结:对比现有若干系统后,我决定从文档较规范的系统入手,仔细挖掘其中的关键函数和对应的作用,试着逐渐理解。比如可视化程度比较好的meshlab,更适合OS X平台的MVE,以及能够配套使用的完整库OpenMVG和OpenMVS。顺便挖一些有价值的论文一起啃。未来几个月的任务仍然艰巨,不可懈怠。
此外,这份文档处于入门级别,仅仅是粗略记录这些系统的功能,方便找到项目地址。仅供参考,欢迎交流。
参考:- 对比几个三维重建系统

