1)实验平台:正点原子阿尔法Linux开发板 2)平台购买地址:https://item.taobao.com/item.htm?id=603672744434 2)全套实验源码+手册+视频下载地址:http://www.openedv.com/thread-300792-1-1.html 3)对正点原子Linux感兴趣的同学可以加群讨论:935446741 4)关注正点原子公众号,获取最新资料更新 
第二十七章 SPI实验
同I2C一样,SPI是很常用的通信接口,也可以通过SPI来连接众多的传感器。相比I2C接口,SPI接口的通信速度很快,I2C最多400KHz,但是SPI可以到达几十MHz。I.MX6U也有4个SPI接口,可以通过这4个SPI接口来连接一些SPI外设。I.MX6U-ALPHA使用SPI3接口连接了一个六轴传感器ICM-20608,本章我们就来学习如何使用I.MX6U的SPI接口来驱动ICM-20608,读取ICM-20608的六轴数据。
27.1 SPI & ICM-20608简介 27.1.1 SPI简介 上一章我们讲解了I2C,I2C是串行通信的一种,只需要两根线就可以完成主机和从机之间的通信,但是I2C的速度最高只能到400KHz,如果对于访问速度要求比价高的话I2C就不适合了。本章我们就来学习一下另外一个和I2C一样广泛使用的串行通信:SPI,SPI全称是Serial Perripheral Interface,也就是串行外围设备接口。SPI是Motorola公司推出的一种同步串行接口技术,是一种高速、全双工的同步通信总线,SPI时钟频率相比I2C要高很多,最高可以工作在上百MHz。SPI以主从方式工作,通常是有一个主设备和一个或多个从设备,一般SPI需要4根线,但是也可以使用三根线(单向传输),本章我们讲解标准的4线SPI,这四根线如下: ①、CS/SS,Slave Select/Chip Select,这个是片选信号线,用于选择需要进行通信的从设备。I2C主机是通过发送从机设备地址来选择需要进行通信的从机设备的,SPI主机不需要发送从机设备,直接将相应的从机设备片选信号拉低即可。 ②、SCK,Serial Clock,串行时钟,和I2C的SCL一样,为SPI通信提供时钟。 ③、MOSI/SDO,Master Out Slave In/Serial Data Output,简称主出从入信号线,这根数据线只能用于主机向从机发送数据,也就是主机输出,从机输入。 ④、MISO/SDI,Master In Slave Out/Serial Data Input,简称主入从出信号线,这根数据线只能用户从机向主机发送数据,也就是主机输入,从机输出。 SPI通信都是由主机发起的,主机需要提供通信的时钟信号。主机通过SPI线连接多个从设备的结构如图27.1.1.1所示: 
图27.1.1.1 SPI设备连接图 SPI有四种工作模式,通过串行时钟极性(CPOL)和相位(CPHA)的搭配来得到四种工作模式: ①、CPOL=0,串行时钟空闲状态为低电平。 ②、CPOL=1,串行时钟空闲状态为高电平,此时可以通过配置时钟相位(CPHA)来选择具体的传输协议。 ③、CPHA=0,串行时钟的第一个跳变沿(上升沿或下降沿)采集数据。 ④、CPHA=1,串行时钟的第二个跳变沿(上升沿或下降沿)采集数据。 这四种工作模式如图27.1.1.2所示: 
图27.1.1.2 SPI四种工作模式 跟I2C一样,SPI也是有时序图的,以CPOL=0,CPHA=0这个工作模式为例,SPI进行全双工通信的时序如图27.1.1.3所示: 
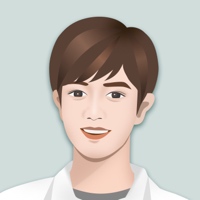
图27.1.1.3 SPI时序图 从图27.1.1.3可以看出,SPI的时序图很简单,不像I2C那样还要分为读时序和写时序,因为SPI是全双工的,所以读写时序可以一起完成。图27.1.1.3中,CS片选信号先拉低,选中要通信的从设备,然后通过MOSI和MISO这两根数据线进行收发数据,MOSI数据线发出了0XD2这个数据给从设备,同时从设备也通过MISO线给主设备返回了0X66这个数据。这个就是SPI时序图。 关于SPI就讲解到这里,接下来我们看一下I.MX6U自带的SPI外设:ECSPI。 27.1.2 I.MX6U ECSPI简介 I.MX6U自带的SPI外设叫做ECSPI,全称是Enhanced Configurable Serial Peripheral Interface,别看前面加了个“EC”就以为和标准SPI有啥不同的,其实就是SPI。ECSPI有6432个接收FIFO(RXFIFO)和6432个发送FIFO(TXFIFO),ECSPI特性如下: ①、全双工同步串行接口。 ②、可配置的主/从模式。 ③、四个片选信号,支持多从机。 ④、发送和接收都有一个32x64的FIFO。 ⑤、片选信号SS/CS,时钟信号SCLK极性可配置。 ⑥、支持DMA。 I.MX6U的ECSPI可以工作在主模式或从模式,本章我们使用主模式,I.MX6U有4个ECSPI,每个ECSPI支持四个片选信号,也就说,如果你要使用ECSPI的硬件片选信号的话,一个ECSPI可以支持4个外设。如果不使用硬件的片选信号就可以支持无数个外设,本章实验我们不使用硬件片选信号,因为硬件片选信号只能使用指定的片选IO,软件片选的话可以使用任意的IO。 我们接下来看一下ECSPI的几个重要的寄存器,首先看一下ECSPIx_CONREG(x=1~4)寄存器,这是ECSPI的控制寄存器,此寄存器结构如图27.1.2.1所示: 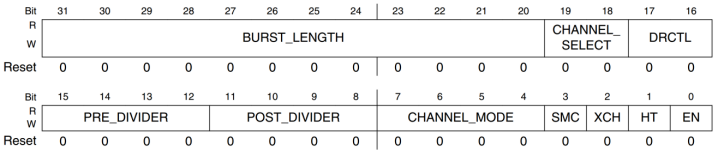
图27.1.2.1 寄存器ECSPIx_CONREG结构 寄存器ECSPIx_CONREG各位含义如下: BURST_LENGTH(bit31:24):突发长度,设置SPI的突发传输数据长度,在一次SPI发送中最大可以发送212bit数据。可以设置0X000~0XFFF,分别对应1~212bit。我们一般设置突发长度为一个字节,也就是8bit,BURST_LENGTH=7。 CHANNEL_SELECT(bit19:18):SPI通道选择,一个ECSPI有四个硬件片选信号,每个片选信号是一个硬件通道,虽然我们本章实验使用的软件片选,但是SPI通道还是要选择的。可设置为03,分别对应通道03。I.MX6U-ALPHA开发板上的ICM-20608的片选信号接的是ECSPI3_SS0,也就是ECSPI3的通道0,所以本章实验设置为0。 DRCTL(bit17:16):SPI的SPI_RDY信号控制位,用于设置SPI_RDY信号,为0的话不关心SPI_RDY信号;为1的话SPI_RDY信号为边沿触发;为2的话SPI_DRY是电平触发。 PRE_DIVIDER(bit15:12):SPI预分频,ECSPI时钟频率使用两步来完成分频,此位设置的是第一步,可设置015,分别对应116分频。 POST_DIVIDER(bit11:8):SPI分频值,ECSPI时钟频率的第二步分频设置,分频值为2^POST_DIVIDER。 CHANNEL_MODE(bit7:4):SPI通道主/从模式设置,CHANNEL_MODE[3:0]分别对应SPI通道3~0,为0的话就是设置为从模式,如果为1的话就是主模式。比如设置为0X01的话就是设置通道0为主模式。 SMC(bit3):开始模式控制,此位只能在主模式下起作用,为0的话通过XCH位来开启SPI突发访问,为1的话只要向TXFIFO写入数据就开启SPI突发访问。 XCH(bit2):此位只在主模式下起作用,当SMC为0的话此位用来控制SPI突发访问的开启。 HT(bit1):HT模式使能位,I.MX6ULL不支持。 EN(bit0):SPI使能位,为0的话关闭SPI,为1的话使能SPI。 接下来看一下寄存器ECSPIx_CONFIGREG,这个也是ECSPI的配置寄存器,此寄存器结构如图27.1.2.2所示: 
图27.1.2.2 寄存器ECSPIx_CONFIGREG结构 寄存器ECSPIx_CONFIGREG用到的重要位如下: HT_LENGTH(bit28:24):HT模式下的消息长度设置,I.MX6ULL不支持。 SCLK_CTL(bit23:20):设置SCLK信号线空闲状态电平,SCLK_CTL[3:0]分别对应通道3~0,为0的话SCLK空闲状态为低电平,为1的话SCLK空闲状态为高电平。 DATA_CTL(bit19:16):设置DATA信号线空闲状态电平,DATA_CTL[3:0]分别对应通道3~0,为0的话DATA空闲状态为高电平,为1的话DATA空闲状态为低电平。 SS_POL(bit15:12):设置SPI片选信号极性设置,SS_POL[3:0]分别对应通道3~0,为0的话片选信号低电平有效,为1的话片选信号高电平有效。 SCLK_POL(bit7:4):SPI时钟信号极性设置,也就是CPOL,SCLK_POL[3:0]分别对应通道3~0,为0的话SCLK高电平有效(空闲的时候为低电平),为1的话SCLK低电平有效(空闲的时候为高电平)。 SCLK_PHA(bit3:0):SPI时钟相位设置,也就是CPHA,SCLK_PHA[3:0]分别对应通道3~0,为0的话串行时钟的第一个跳变沿(上升沿或下降沿)采集数据,为1的话串行时钟的第二个跳变沿(上升沿或下降沿)采集数据。 通过SCLK_POL和SCLK_PHA可以设置SPI的工作模式。 接下来看一下寄存器ECSPIx_PERIODREG,这个是ECSPI的采样周期寄存器,此寄存器结构如图27.1.2.3所示: 
图27.1.2.3 寄存器ECSPIx_PERIODREG结构 寄存器ECSPIx_PERIODREG用到的重要位如下: CSD_CTL(bit21:16):片选信号延时控制位,用于设置片选信号和第一个SPI时钟信号之间的时间间隔,范围为0~63。 CSRC(bit15):SPI时钟源选择,为0的话选择SPI CLK为SPI的时钟源,为1的话选择32.768KHz的晶振为SPI时钟源。我们一般选择SPI CLK作为SPI时钟源,SPI CLK时钟来源如图27.1.2.4所示: 
图27.1.2.4 SPI CLK时钟源 图27.1.2.4中各部分含义如下: ①、这是一个选择器,用于选择根时钟源,由寄存器CSCDR2的位ECSPI_CLK_SEL来控制,为0的话选择pll3_60m作为ECSPI根时钟源。为1的话选择osc_clk作为ECSPI时钟源。本章我们选择pll3_60m作为ECSPI根时钟源。 ②、ECSPI时钟分频值,由寄存器CSCDR2的位ECSPI_CLK_PODF来控制,分频值为2^ECSPI_CLK_PODF。本章我们设置为0,也就是1分频。 ③、最终进入ECSPI的时钟,也就是SPI CLK=60MHz。 SAMPLE_PERIO:采样周期寄存器,可设置为00X7FFF分别对应032767个周期。 接下来看一下寄存器ECSPIx_STATREG,这个是ECSPI的状态寄存器,此寄存器结构如图27.1.2.5所示: 
图27.1.2.5 寄存器ECSPIx_STATREG寄存器 寄存器ECSPIx_STATREG用到的重要位如下: TC(bit7):传输完成标志位,为0表示正在传输,为1表示传输完成。 RO(bit6):RXFIFO溢出标志位,为0表示RXFIFO无溢出,为1表示RXFIFO溢出。 RF(bit5):RXFIFO空标志位,为0表示RXFIFO不为空,为1表示RXFIFO为空。 RDR(bit4):RXFIFO数据请求标志位,此位为0表示RXFIFO里面的数据不大于RX_THRESHOLD,此位为1的话表示RXFIFO里面的数据大于RX_THRESHOLD。 RR(bit3):RXFIFO就绪标志位,为0的话RXFIFO没有数据,为1的话表示RXFIFO中至少有一个字的数据。 TF(bit2):TXFIFO满标志位,为0的话表示TXFIFO不为满,为1的话表示TXFIFO为满。 TDR(bit1):TXFIFO数据请求标志位,为0表示TXFIFO中的数据大于TX_THRESHOLD,为1表示TXFIFO中的数据不大于TX_THRESHOLD。 TE(bit0):TXFIFO空标志位,为0表示TXFIFO中至少有一个字的数据,为1表示TXFIFO为空。 最后就是两个数据寄存器,ECSPIx_TXDATA和ECSPIx_RXDATA,这两个寄存器都是32位的,如果要发送数据就向寄存器ECSPIx_TXDATA写入数据,读取及存取ECSPIx_RXDATA里面的数据就可以得到刚刚接收到的数据。 关于ECSPI的寄存器就介绍到这里,关于这些寄存器详细的描述,请参考《I.MX6ULL参考手册》第805页的20.7小节。 27.1.3 ICM-20608简介 ICM-20608是InvenSense出品的一款6轴MEMS传感器,包括3轴加速度和3轴陀螺仪。ICM-20608尺寸非常小,只有3x3x0.75mm,采用16P的LGA封装。ICM-20608内部有一个512字节的FIFO。陀螺仪的量程范围可以编程设置,可选择±250,±500,±1000和±2000°/s,加速度的量程范围也可以编程设置,可选择±2g,±4g,±8g和±16g。陀螺仪和加速度计都是16位的ADC,并且支持I2C和SPI两种协议,使用I2C接口的话通信速度最高可以达到400KHz,使用SPI接口的话通信速度最高可达到8MHz。I.MX6U-ALPHA开发板上的ICM-20608通过SPI接口和I.MX6U连接在一起。ICM-20608特性如下: ①、陀螺仪支持X,Y和Z三轴输出,内部集成16位ADC,测量范围可设置:±250,±500,±1000和±2000°/s。 ②、加速度计支持X,Y和Z轴输出,内部集成16位ADC,测量范围可设置:±2g,±4g,±4g,±8g和±16g。 ③、用户可编程中断。 ④、内部包含512字节的FIFO。 ⑤、内部包含一个数字温度传感器。 ⑥、耐10000g的冲击。 ⑦、支持快速I2C,速度可达400KHz。 ⑧、支持SPI,速度可达8MHz。 ICM-20608的3轴方向如图27.1.3.1所示: 
图27.1.3.1 ICM-20608检测轴方向和极性 ICM-20608的结构框图如图27.1.3.2所示: 
图27.1.3.2 ICM-20608框图 如果使用IIC接口的话ICM-20608的AD0引脚决定I2C设备从地址的最后一位,如果AD0为0的话ICM-20608从设备地址是0X68,如果AD0为1的话ICM-20608从设备地址为0X69。本章我们使用SPI接口,跟上一章使用AP3216C一样,ICM-20608也是通过读写寄存器来配置和读取传感器数据,使用SPI接口读写寄存器需要16个时钟或者更多(如果读写操作包括多个字节的话),第一个字节包含要读写的寄存器地址,寄存器地址最高位是读写标志位,如果是读的话寄存器地址最高位要为1,如果是写的话寄存器地址最高位要为0,剩下的7位才是实际的寄存器地址,寄存器地址后面跟着的就是读写的数据。表27.1.3.1列出了本章实验用到的一些寄存器和位,关于ICM-20608的详细寄存器和位的介绍请参考ICM-20608的寄存器手册: 寄存器地址 位 寄存器功能 描述 0X19 SMLPRT_DIV[7:0] 输出速率设置 设置输出速率,输出速率计算公式如下: SAMPLE_RATE=INTERNAL_SAMPLE_RATE/ (1 + SMPLRT_DIV) 0X1A DLPF_CFG[2:0] 芯片配置 设置陀螺仪低通滤波。可设置0~7。 0X1B FS_SEL[1:0] 陀螺仪量程设置 0:±250dps;1:±500dps;2:±1000dps 3:±2000dps 0X1C ACC_FS_SEL[1:0] 加速度计量程设置 0:±2g;1:±4g;2:±8g;3:±16g 0X1D A_DLPF_CFG[2:0] 加速度计低通滤波设置 设置加速度计的低通滤波,可设置0~7。 0X1E GYRO_CYCLE[7] 陀螺仪低功耗使能 0:关闭陀螺仪的低功耗功能。 1:使能陀螺仪的低功耗功能。 0X23 TEMP_FIFO_EN[7] FIFO使能控制 1:使能温度传感器FIFO。 0:关闭温度传感器FIFO。 XG_FIFO_EN[6] 1:使能陀螺仪X轴FIFO。 0:关闭陀螺仪X轴FIFO。 YG_FIFO_EN[5] 1:使能陀螺仪Y轴FIFO。 0:关闭陀螺仪Y轴FIFO。 ZG_FIFO_EN[4] 1:使能陀螺仪Z轴FIFO。 0:关闭陀螺仪Z轴FIFO。 ACCEL_FIFO_EN[3] 1:使能加速度计FIFO。 0:关闭加速度计FIFO。 0X3B ACCEL_XOUT_H[7:0] 数据寄存器 加速度X轴数据高8位 0X3C ACCEL_XOUT_L[7:0] 加速度X轴数据低8位 0X3D ACCEL_YOUT_H[7:0] 加速度Y轴数据高8位 0X3E ACCEL_YOUT_L[7:0] 加速度Y轴数据低8位 0X3F ACCEL_ZOUT_H[7:0] 加速度Z轴数据高8位 0X40 ACCEL_ZOUT_L[7:0] 加速度Z轴数据低8位 0X41 TEMP_OUT_H[7:0] 温度数据高8位 0X42 TEMP_OUT_L[7:0] 温度数据低8位 0X43 GYRO_XOUT_H[7:0] 陀螺仪X轴数据高8位 0X44 GYRO_XOUT_L[7:0] 陀螺仪X轴数据低8位 0X45 GYRO_YOUT_H[7:0] 陀螺仪Y轴数据高8位 0X46 GYRO_YOUT_L[7:0] 陀螺仪Y轴数据低8位 0X47 GYRO_ZOUT_H[7:0] 陀螺仪Z轴数据高8位 0X48 GYRO_ZOUT_L[7:0] 陀螺仪Z轴数据低8位 0X6B DEVICE_RESET[7] 电源管理寄存器1 1:复位ICM-20608。 SLEEP[6] 0:退出休眠模式;1,进入休眠模式 0X6C STBY_XA[5] 电源管理寄存器2 0:使能加速度计X轴。 1:关闭加速度计X轴。 STBY_YA[4] 0:使能加速度计Y轴。 1:关闭加速度计Y轴。 STBY_ZA[3] 0:使能加速度计Z轴。 1:关闭加速度计Z轴。 STBY_XG[2] 0:使能陀螺仪X轴。 1:关闭陀螺仪X轴。 STBY_YG[1] 0:使能陀螺仪Y轴。 1:关闭陀螺仪Y轴。 STBY_ZG[0] 0:使能陀螺仪Z轴。 1:关闭陀螺仪Z轴。 0X75 WHOAMI[7:0] ID寄存器,ICM-20608G的ID为0XAF, ICM-20608D的ID为0XAE。 表27.1.3.1 ICM-20608寄存器表 ICM-20608的介绍就到这里,关于ICM-20608的详细介绍请参考ICM-20608的数据手册和寄存器手册。 27.2 硬件原理分析 本试验用到的资源如下: ①、指示灯LED0。 ②、 RGB LCD屏幕。 ③、ICM20608 ④、串口 ICM-20608是在I.MX6U-ALPHA开发板底板上,原理图如图27.2.1所示: 
图27.2.1 ICM-20608原理图 27.3 实验程序编写 本实验对应的例程路径为:开发板光盘-> 1、裸机例程-> 18_spi。 本章实验在上一章例程的基础上完成,更改工程名字为“icm20608”,然后在bsp文件夹下创建名为“spi”和“icm20608”的文件。在bsp/spi中新建bsp_spi.c和bsp_spi.h这两个文件,在bsp/icm20608中新建bsp_icm20608.c和bsp_icm20608.h这两个文件。bsp_spi.c和bsp_spi.h是I.MX6U的SPI文件,bsp_icm20608.c和bsp_icm20608.h是ICM20608的驱动文件。在bsp_spi.h中输入如下内容: 示例代码27.3.1 bsp_spi.h文件代码
1 #ifndef _BSP_SPI_H
2 #define _BSP_SPI_H
3 /***************************************************************
4 Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
5 文件名 : bsp_spi.h
6 作者 : 左忠凯
7 版本 : V1.0
8 描述 : SPI驱动头文件。
9 其他 : 无
10 论坛 : www.openedv.com
11 日志 : 初版V1.0 2019/1/17 左忠凯创建
12 ***************************************************************/
13 #include "imx6ul.h"
14
15 /* 函数声明 */
16 void spi_init(ECSPI_Type *base);
17 unsigned char spich0_readwrite_byte(ECSPI_Type *base,
unsigned char txdata);
18 #endif
文件bsp_spi.h内容很简单,就是函数声明。在文件bsp_spi.c中输入如下内容:
示例代码27.3.2 bsp_spi.c文件代码
/***************************************************************
Copyright © zuozhongkai Co., Ltd. 1998-2019. All rights reserved.
文件名 : bsp_spi.c
作者 : 左忠凯
版本 : V1.0
描述 : SPI驱动文件。
其他 : 无
论坛 : www.openedv.com
日志 : 初版V1.0 2019/1/17 左忠凯创建
***************************************************************/
1 #include "bsp_spi.h"
2 #include "bsp_gpio.h"
3 #include "stdio.h"
4
5 /*
6 * @description : 初始化SPI
7 * @param - base : 要初始化的SPI
8 * @return : 无
9 */
10 void spi_init(ECSPI_Type *base)
11 {
12 /* 配置CONREG寄存器
13 * bit0 : 1 使能ECSPI
14 * bit3 : 1 当向TXFIFO写入数据以后立即开启SPI突发。
15 * bit[7:4]: 0001 SPI通道0主模式,根据实际情况选择,开发板上的
16 * ICM-20608接在SS0上,所以设置通道0为主模式
17 * bit[19:18]: 00 选中通道0(其实不需要,因为片选信号我们我们自己控制)
18 * bit[31:20]: 0x7 突发长度为8个bit。
19 */
20 base->CONREG = 0; /* 先清除控制寄存器 */
21 base->CONREG |= (1
关注
打赏
最近更新
- 深拷贝和浅拷贝的区别(重点)
- 【Vue】走进Vue框架世界
- 【云服务器】项目部署—搭建网站—vue电商后台管理系统
- 【React介绍】 一文带你深入React
- 【React】React组件实例的三大属性之state,props,refs(你学废了吗)
- 【脚手架VueCLI】从零开始,创建一个VUE项目
- 【React】深入理解React组件生命周期----图文详解(含代码)
- 【React】DOM的Diffing算法是什么?以及DOM中key的作用----经典面试题
- 【React】1_使用React脚手架创建项目步骤--------详解(含项目结构说明)
- 【React】2_如何使用react脚手架写一个简单的页面?

