以下文章来源于:公_众_号开源电子网 读取更多技术文章,请扫码关注 
本文我们来学习下如何使用STM32去控制舵机旋转相应角度。 舵机介绍 舵机实质上可以看作一个伺服电机,它也有驱动电路、控制电路,只不过一般舵机工作范围只旋转一定的角度,最常见的就是180°的舵机,当然也有360°的舵机,这里只以180°舵机为例 
图1:SG90舵机
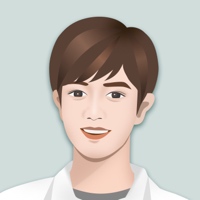
舵机内部结构舵机主要由以下几个部分组成,减速齿轮组、位置反馈电位计、直流电机、内部控制电路板
当直流电机接收到脉冲指令就会开始转动,之后带动减速齿轮组,减速齿轮组会带动下方接的电位器,之后控制板读取到电位器的信号变化,就可以知道当前舵机旋转的角度,这样就形成了一个闭环回路。
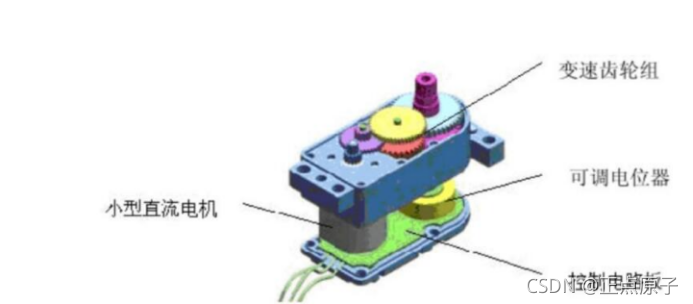
舵机控制舵机的控制一般需要一个20ms的脉宽调制(PWM)信号,该脉冲的高电平部分一般为0.5ms-2.5ms范围相对应舵盘位置的0-180°,那么对应的控制关系如下: 0.5ms--------------0度 1.0ms--------------45度 1.5ms--------------90度 2.0ms--------------135度 2.5ms--------------180度
舵机与脉冲高电平时间关系动图(周期20ms): 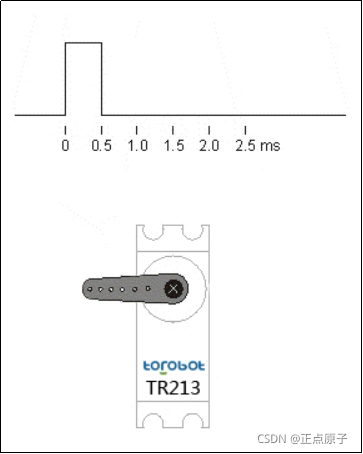 一般舵机有三根信号线
一般舵机有三根信号线 
棕色表示GND, 红色表示VCC, 橙色表示信号脚(即脉冲输入引脚)
代码实现那我们知道了舵机的控制原理了,我们只需要使用STM32的定时器外设不断输出周期为20ms的脉冲信号,且控制高电平时间在0.5ms - 2.5ms之间即可控制舵机旋转角度了。 本文将使用STM32F407,TIM8_CH1输出脉冲控制舵机 CubeMX配置 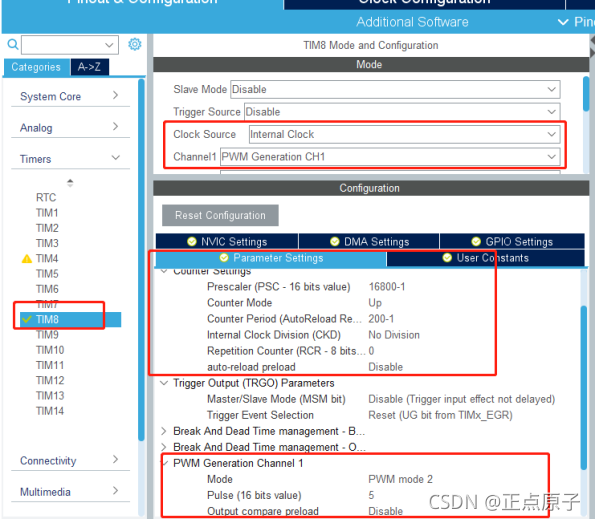
这样就配置好不断输出周期20ms脉冲信号了 代码编写: 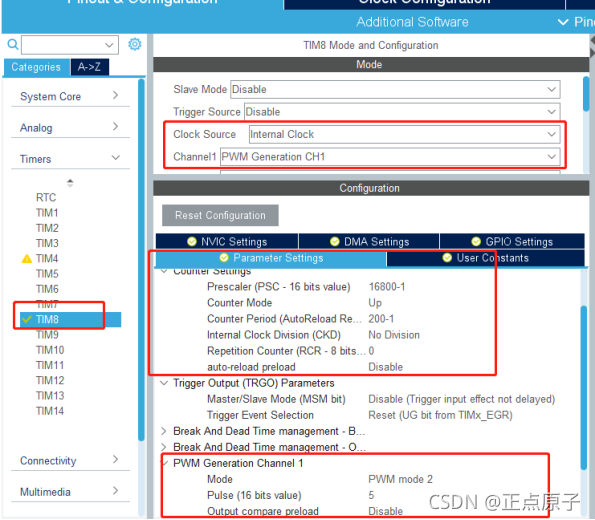 ①启动TIM8_CH1的脉冲输出; ②在while里边,每秒修改高电平持续时间 0.5ms对应0°, 1ms对应45°, 1.5ms对应90°, 2ms对应135°, 2.5ms对应180°。
①启动TIM8_CH1的脉冲输出; ②在while里边,每秒修改高电平持续时间 0.5ms对应0°, 1ms对应45°, 1.5ms对应90°, 2ms对应135°, 2.5ms对应180°。
这样就大功告成了!!!大家有问题可以留言,或者留下你们想看的内容。