- 前言
- PID算法
- 比例环节P
- 积分环节I
- 微分环节D
- 离散PID
- 位置式PID
- 增量式PID
PID应该是应用最广泛的控制算法(没有之一)。无人机中的飞控就是基于PID的。
PID算法PID——Proportional, Integral, Derivate,就是比例-积分-微分控制。
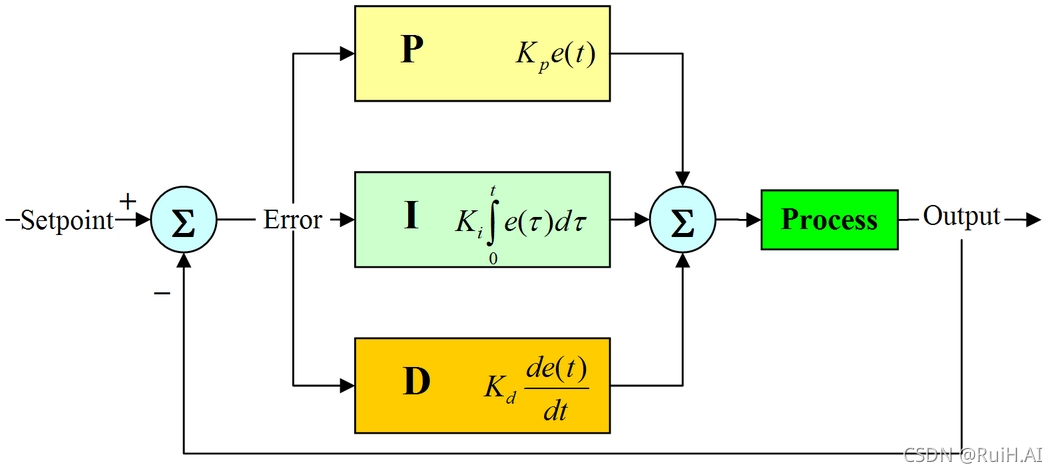 PID的控制公式如下:
u
(
t
)
=
K
p
e
(
t
)
+
K
i
∫
0
t
e
(
σ
)
d
σ
+
K
d
d
e
(
t
)
d
t
\begin{aligned} & u(t)=K_pe(t)+K_i \int_0^t e(\sigma)d\sigma +K_d \frac{de(t)} {dt} \\ \end{aligned}
u(t)=Kpe(t)+Ki∫0te(σ)dσ+Kddtde(t)
K
p
K_p
Kp——比例增益
K
i
K_i
Ki——积分增益
K
d
K_d
Kd——微分增益
PID的控制公式如下:
u
(
t
)
=
K
p
e
(
t
)
+
K
i
∫
0
t
e
(
σ
)
d
σ
+
K
d
d
e
(
t
)
d
t
\begin{aligned} & u(t)=K_pe(t)+K_i \int_0^t e(\sigma)d\sigma +K_d \frac{de(t)} {dt} \\ \end{aligned}
u(t)=Kpe(t)+Ki∫0te(σ)dσ+Kddtde(t)
K
p
K_p
Kp——比例增益
K
i
K_i
Ki——积分增益
K
d
K_d
Kd——微分增益
由控制量和期望量的误差与比例增益 K p K_p Kp加权产生,用于迅速减小控制量与期望量之间的差距。
K p K_p Kp越大,过渡时间越快,稳态误差越小,但容易出现振荡不稳。
积分环节I由误差的累计与积分增益 K i K_i Ki加权产生,用于消除稳态误差。
K i K_i Ki越大,消除稳态误差速度越快,但容易出现振荡不稳,超调量增加,达到稳定的时间延后。
微分环节D由误差的变化速度与微分增益 K d K_d Kd加权产生,用于阻尼误差的产生,减少超调量。
K d K_d Kd越大,超调量降低,稳定性上升,达到稳定的时间提前,但容易受到输入噪声的影响。
离散PID标准PID公式建立在连续状态空间中,而实际场景应用是,控制算法需要进行离散化,有两种离散化方法。
位置式PIDu ( T ) = K p e ( T ) + K i ∑ n = 0 T e ( n ) + K d [ e ( T ) − e ( T − 1 ) ] \begin{aligned} & u(T)=K_pe(T)+K_i \sum_{n=0}^Te(n) +K_d [e(T)-e(T-1)] \\ \end{aligned} u(T)=Kpe(T)+Kin=0∑Te(n)+Kd[e(T)−e(T−1)] 优点:非递推,控制量与当前状态对应。 缺点:误差需要从开始累加到当前,计算量大。
增量式PIDΔ u ( T ) = K p [ e ( T ) − e ( T − 1 ) ] + k i e ( T ) + K d [ e ( T ) − 2 e ( T − 1 ) + e ( T − 2 ) ] u ( T ) = u ( T − 1 ) + Δ u ( T ) \Delta u(T) = K_p[e(T)-e(T-1)] + k_ie(T)+K_d[e(T)-2e(T-1)+e(T-2)] \\ u(T)=u(T-1)+\Delta u(T) Δu(T)=Kp[e(T)−e(T−1)]+kie(T)+Kd[e(T)−2e(T−1)+e(T−2)]u(T)=u(T−1)+Δu(T) 优点:控制增量仅与近三次误差量相关,计算量小。 缺点:有稳态误差。


