
- 前言
- 坐标系
- 位姿
- 位置
- 姿态
- 位姿变换
- 映射
- 平移
- 旋转
- 变换
- 复合变换
- 逆变换
- 旋转矩阵,变换矩阵的意义
- 旋转矩阵的意义
- 变换矩阵的意义
- 后记
由于视觉伺服与机械臂关系紧密,因此还是从基础开始,把机器人运动学记录一下。
本篇记录刚体的位姿。实际上,空间变换在SLAM专栏里已经讲过一次了,不过机器人学导论给出了更详细的刚体运动说明。
坐标系通常有两个坐标系,一个是用于参考的世界坐标系(笛卡尔坐标系),一个是以刚体质心为原点的刚体坐标系。
机器人坐标系遵循右手定则,如下图所示 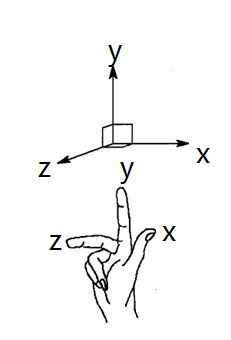
位姿就是位置与姿态,对应位移与旋转。机器人的位姿必须以世界坐标系作为参照。
位姿表示的是参考系之间的关系。
位置刚体的位置由矢量表示。 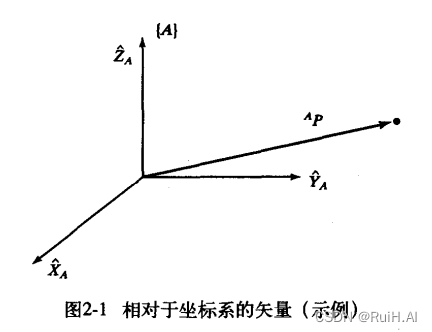 上图中有一个点
P
P
P,以坐标系
{
A
}
\{A\}
{A}为参考,就可以将矢量
O
P
OP
OP来表示
A
P
^AP
AP的位置,其左上标表示参考系。
A
P
^AP
AP的坐标表示为:
A
P
=
[
p
x
,
p
y
,
p
z
]
T
^AP = [p_x,p_y,p_z]^T
AP=[px,py,pz]T
上图中有一个点
P
P
P,以坐标系
{
A
}
\{A\}
{A}为参考,就可以将矢量
O
P
OP
OP来表示
A
P
^AP
AP的位置,其左上标表示参考系。
A
P
^AP
AP的坐标表示为:
A
P
=
[
p
x
,
p
y
,
p
z
]
T
^AP = [p_x,p_y,p_z]^T
AP=[px,py,pz]T
刚体的姿态由刚体坐标系在参考系中三个主轴的单位矢量表示。
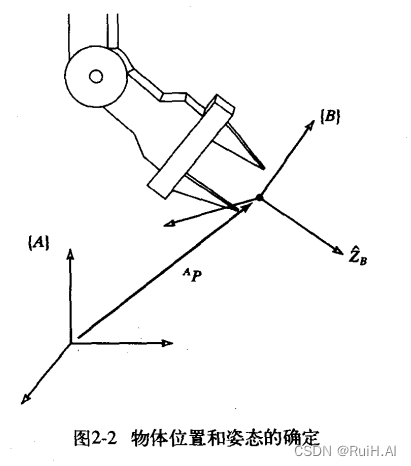 上图中,
X
^
B
,
Y
^
B
,
Z
^
B
\hat X_B,\hat Y_B, \hat Z_B
X^B,Y^B,Z^B表示右上角刚体的三个主轴方向的单位矢量,它们在参考系
{
A
}
\{A\}
{A}中的表示为
A
X
^
B
,
A
Y
^
B
,
A
Z
^
B
^A\hat X_B, ^A\hat Y_B, ^A\hat Z_B
AX^B,AY^B,AZ^B。这三个单位矢量就组成了旋转矩阵:
B
A
R
=
(
A
X
^
B
A
Y
^
B
A
Z
^
B
)
^A_BR=(^A\hat X_B \quad ^A\hat Y_B \quad ^A\hat Z_B)
BAR=(AX^BAY^BAZ^B)
上图中,
X
^
B
,
Y
^
B
,
Z
^
B
\hat X_B,\hat Y_B, \hat Z_B
X^B,Y^B,Z^B表示右上角刚体的三个主轴方向的单位矢量,它们在参考系
{
A
}
\{A\}
{A}中的表示为
A
X
^
B
,
A
Y
^
B
,
A
Z
^
B
^A\hat X_B, ^A\hat Y_B, ^A\hat Z_B
AX^B,AY^B,AZ^B。这三个单位矢量就组成了旋转矩阵:
B
A
R
=
(
A
X
^
B
A
Y
^
B
A
Z
^
B
)
^A_BR=(^A\hat X_B \quad ^A\hat Y_B \quad ^A\hat Z_B)
BAR=(AX^BAY^BAZ^B)
那么如何计算刚体的主轴单位矢量在参考系中的坐标呢?
以 A X ^ B ^A\hat X_B AX^B为例,其x坐标的值实际上就是 A X ^ B ^A\hat X_B AX^B在参考系的X轴上的投影,y, z坐标就是在参考系的Y, Z轴上的投影: B A R = ( A X ^ B A Y ^ B A Z ^ B ) = [ X ^ B ⋅ X ^ A Y ^ B ⋅ X ^ A Z ^ B ⋅ X ^ A X ^ B ⋅ Y ^ A Y ^ B ⋅ Y ^ A Z ^ B ⋅ Y ^ A X ^ B ⋅ Z ^ A Y ^ B ⋅ Y ^ A Z ^ B ⋅ X ^ A ] ^A_BR=(^A\hat X_B \quad ^A\hat Y_B \quad ^A\hat Z_B) = \begin{bmatrix} \hat X_B \cdot \hat X_A & \hat Y_B \cdot \hat X_A & \hat Z_B \cdot \hat X_A\\ \hat X_B \cdot \hat Y_A & \hat Y_B \cdot \hat Y_A & \hat Z_B \cdot \hat Y_A\\ \hat X_B \cdot \hat Z_A & \hat Y_B \cdot \hat Y_A & \hat Z_B \cdot \hat X_A\\ \end{bmatrix} BAR=(AX^BAY^BAZ^B)=⎣⎡X^B⋅X^AX^B⋅Y^AX^B⋅Z^AY^B⋅X^AY^B⋅Y^AY^B⋅Y^AZ^B⋅X^AZ^B⋅Y^AZ^B⋅X^A⎦⎤
旋转矩阵是个正交矩阵,证明也很简单: B A R T B A R = [ A X ^ B T A Y ^ B T A Z ^ B T ] ( A X ^ B A Y ^ B A Z ^ B ) = I 3 ^A_BR^T\ ^A_B R= \begin{bmatrix} ^A\hat X^T_B \\ ^A\hat Y^T_B \\ ^A\hat Z^T_B \end{bmatrix} (^A\hat X_B \quad ^A\hat Y_B \quad ^A\hat Z_B) = I_3 BART BAR=⎣⎡AX^BTAY^BTAZ^BT⎦⎤(AX^BAY^BAZ^B)=I3 同方向的单位矢量的内积为1,相互垂直的单位矢量内积为0,因此 A X ^ B T A X ^ B = 1 , A X ^ B T A Y ^ B = 0 ^A\hat X^T_B \ ^A\hat X_B=1, ^A\hat X^T_B \ ^A\hat Y_B=0 AX^BT AX^B=1,AX^BT AY^B=0,所以能得到上面的单位矩阵。
位姿变换位姿变换指刚体坐标系的位置和姿态发生变化,即平移和旋转,得到刚体系与参考系之间的相对位姿
仍然以图2-2为例,刚体坐标系相对于参考系的位姿变换可表示为: { B A R , A P B O R G } \{^A_B R, \ ^AP_{BORG} \} {BAR, APBORG} 也就是SLAM十四讲中的 R , t R,t R,t
映射映射表示的是同一点在不同坐标系之间的坐标转换。
映射包括平移和旋转。
平移平移与刚体坐标系原点的位置相关。 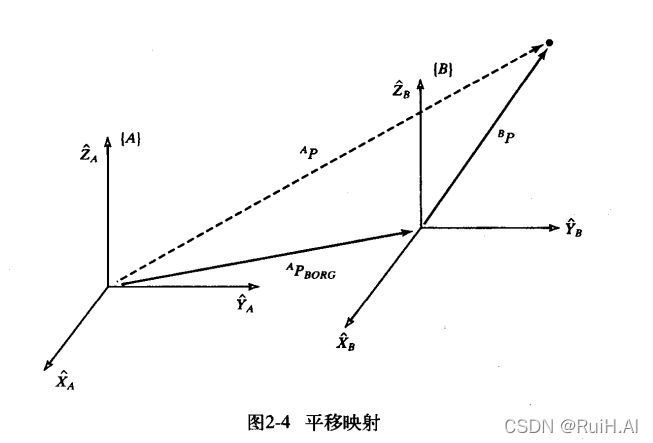 上图中,已知
B
P
^BP
BP表示点P在坐标系
{
B
}
\{B\}
{B}中的位置,
A
P
B
O
R
G
^AP_{BORG}
APBORG表示在参考系
{
A
}
\{A\}
{A}下
{
B
}
\{B\}
{B}原点的位置。则
A
P
^AP
AP可表示为:
A
P
=
B
P
+
A
P
B
O
R
G
^AP= \ ^BP + \ ^AP_{BORG}
AP= BP+ APBORG
上图中,已知
B
P
^BP
BP表示点P在坐标系
{
B
}
\{B\}
{B}中的位置,
A
P
B
O
R
G
^AP_{BORG}
APBORG表示在参考系
{
A
}
\{A\}
{A}下
{
B
}
\{B\}
{B}原点的位置。则
A
P
^AP
AP可表示为:
A
P
=
B
P
+
A
P
B
O
R
G
^AP= \ ^BP + \ ^AP_{BORG}
AP= BP+ APBORG
只有在两个坐标系的姿态相同时,才能进行上面的平移。
旋转旋转与刚体坐标系的姿态相关。
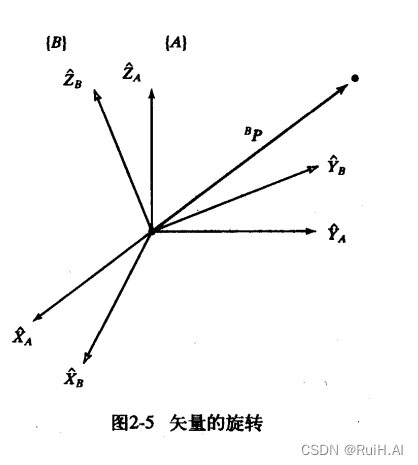 上图中,已知
B
P
^BP
BP表示点P在坐标系
{
B
}
\{B\}
{B}中的位置。
A
P
^AP
AP表示在参考系
{
A
}
\{A\}
{A}下的位置,即矢量
A
P
^AP
AP在参考系主轴方向
X
^
A
,
Y
^
A
,
Z
^
A
\hat X_A, \hat Y_A, \hat Z_A
X^A,Y^A,Z^A的投影(单位矢量内积)。此外,我们知道,向量内积需要在同一坐标系下表示才有意义。则
A
P
^AP
AP可表示为:
A
P
=
[
B
X
^
A
⋅
B
P
B
Y
^
A
⋅
B
P
B
Z
^
A
⋅
B
P
]
=
B
A
R
B
P
^AP= \begin{bmatrix} ^B \hat X_A \cdot\ ^BP & ^B \hat Y_A \cdot\ ^BP & ^B \hat Z_A \cdot\ ^BP \end{bmatrix} = \ ^A_BR \ ^BP
AP=[BX^A⋅ BPBY^A⋅ BPBZ^A⋅ BP]= BAR BP
上图中,已知
B
P
^BP
BP表示点P在坐标系
{
B
}
\{B\}
{B}中的位置。
A
P
^AP
AP表示在参考系
{
A
}
\{A\}
{A}下的位置,即矢量
A
P
^AP
AP在参考系主轴方向
X
^
A
,
Y
^
A
,
Z
^
A
\hat X_A, \hat Y_A, \hat Z_A
X^A,Y^A,Z^A的投影(单位矢量内积)。此外,我们知道,向量内积需要在同一坐标系下表示才有意义。则
A
P
^AP
AP可表示为:
A
P
=
[
B
X
^
A
⋅
B
P
B
Y
^
A
⋅
B
P
B
Z
^
A
⋅
B
P
]
=
B
A
R
B
P
^AP= \begin{bmatrix} ^B \hat X_A \cdot\ ^BP & ^B \hat Y_A \cdot\ ^BP & ^B \hat Z_A \cdot\ ^BP \end{bmatrix} = \ ^A_BR \ ^BP
AP=[BX^A⋅ BPBY^A⋅ BPBZ^A⋅ BP]= BAR BP
变换=先旋转,后平移。
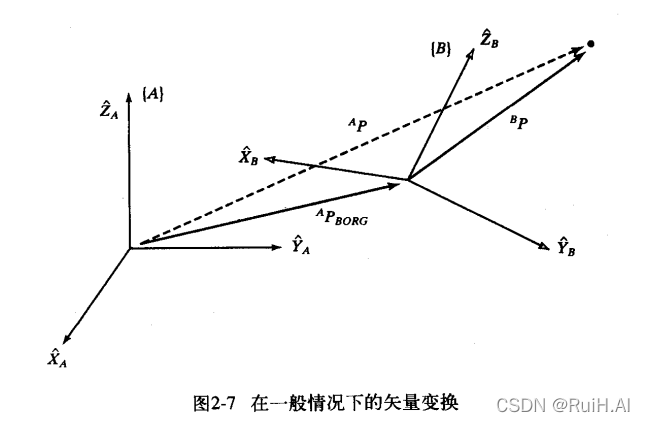 上图中,需要使用
B
P
^BP
BP表示
A
P
^AP
AP。首先将
B
P
^BP
BP映射到一个中间坐标系
{
B
′
}
\{B'\}
{B′},该坐标系姿态与
{
A
}
\{A\}
{A}相同,原点与
{
B
}
\{B\}
{B}相同。然后再用
B
′
P
^{B'}P
B′P表示
A
P
^AP
AP:
A
P
=
B
′
P
+
A
P
B
′
O
R
G
=
B
B
′
R
B
P
+
A
P
B
′
O
R
G
=
B
A
R
B
P
+
A
P
B
O
R
G
^AP = \ ^{B'}P + \ ^AP_{B'ORG} = \ ^{B'}_BR \ ^BP + \ ^AP_{B'ORG} = \ ^{A}_BR \ ^BP + \ ^AP_{BORG}
AP= B′P+ APB′ORG= BB′R BP+ APB′ORG= BAR BP+ APBORG 也就对应SLAM十四讲中的
P
′
=
R
P
+
t
P'=RP+t
P′=RP+t
上图中,需要使用
B
P
^BP
BP表示
A
P
^AP
AP。首先将
B
P
^BP
BP映射到一个中间坐标系
{
B
′
}
\{B'\}
{B′},该坐标系姿态与
{
A
}
\{A\}
{A}相同,原点与
{
B
}
\{B\}
{B}相同。然后再用
B
′
P
^{B'}P
B′P表示
A
P
^AP
AP:
A
P
=
B
′
P
+
A
P
B
′
O
R
G
=
B
B
′
R
B
P
+
A
P
B
′
O
R
G
=
B
A
R
B
P
+
A
P
B
O
R
G
^AP = \ ^{B'}P + \ ^AP_{B'ORG} = \ ^{B'}_BR \ ^BP + \ ^AP_{B'ORG} = \ ^{A}_BR \ ^BP + \ ^AP_{BORG}
AP= B′P+ APB′ORG= BB′R BP+ APB′ORG= BAR BP+ APBORG 也就对应SLAM十四讲中的
P
′
=
R
P
+
t
P'=RP+t
P′=RP+t
引入齐次矩阵,就有了变换矩阵的概念: [ A P 1 ] = [ B A R A P B O R G 0 1 ] [ B P 1 ] A P = B A T B P \begin{bmatrix} ^AP \\ 1 \\ \end{bmatrix} = \begin{bmatrix} \ ^A_BR & ^AP_{BORG} \\ {\bf 0} & 1 \\ \end{bmatrix} \begin{bmatrix} \ ^BP \\ 1 \\ \end{bmatrix} \\ \quad \\ \\ \quad \\ ^AP = \ ^A_BT \ ^BP [AP1]=[ BAR0APBORG1][ BP1]AP= BAT BP
复合变换如果已知 B A T , C B T ^A_B T, \ ^B_CT BAT, CBT,则可以通过 C P ^CP CP表示 A P ^AP AP: A P = B A T C B T C P ^AP = ^A_BT \ ^B_CT \ ^CP AP=BAT CBT CP
逆变换旋转矩阵的逆: B A R = A B R T ^A_B R = \ ^B_AR^T BAR= ABRT
变换矩阵的逆: [ B A R T − B A R T A P B O R G 0 1 ] \begin{bmatrix} \ ^A_BR^T & -^A_BR^T\ ^AP_{BORG} \\ {\bf 0} & 1 \\ \end{bmatrix} [ BART0−BART APBORG1] 变换矩阵的逆有两种求法,一种是直接根据矩阵求逆;另一种是通过变换性质求逆。介绍一下后一种。
如果已知
A
P
^AP
AP求
B
P
^BP
BP,有:
B
P
=
A
B
R
A
P
+
B
P
A
O
R
G
^BP = \ ^B_AR \ ^AP + \ ^BP_{AORG}
BP= ABR AP+ BPAORG 如果
A
P
^AP
AP是
{
B
}
\{B\}
{B}的原点,即:
0
=
B
P
B
O
R
G
=
A
B
R
A
P
B
O
R
G
+
B
P
A
O
R
G
B
P
A
O
R
G
=
−
A
B
R
A
P
B
O
R
G
=
−
B
A
R
T
A
P
B
O
R
G
B
P
=
B
A
R
T
A
P
−
B
A
R
T
A
P
B
O
R
G
{\bf 0} = ^BP_{BORG} = ^B_AR \ ^AP_{BORG} + \ ^BP_{AORG} \\ \quad \\ \ ^BP_{AORG} = - ^B_AR \ ^AP_{BORG} = -^A_BR^T \ ^AP_{BORG} \\ \quad \\ \ ^BP = \ ^A_BR^T \ ^AP - \ ^A_BR^T \ ^AP_{BORG}
0=BPBORG=ABR APBORG+ BPAORG BPAORG=−ABR APBORG=−BART APBORG BP= BART AP− BART APBORG
- 描述一个坐标系相对参考坐标系的姿态
- 将点从一个坐标系转换到参考坐标系
- 将向量在一个坐标系中进行旋转
- 描述一个坐标系相对参考坐标系的位姿
- 将点从一个坐标系转换到参考坐标系
- 将向量在一个坐标系中先旋转,后平移
本篇实际上是SLAM十四讲中位姿变换的更清晰的表述方法,参考系放左上标。

