Possion重建是Kazhdan等2006年提出的网格重建方法[1]。Possion重建的输入是点云及其法向量,输出是三维网格。Poisson有公开的源代码[2]。PCL中也有Poisson的实现。
它的核心思想是点云代表了物体表面的位置,其法向量代表了内外的方向。通过隐式地拟合一个由物体派生的指示函数,可以给出一个平滑的物体表面的估计。

参考: 从点云到网格(三)Poisson重建: https://www.cnblogs.com/luyb/p/5730932.html
相机标定 5-点算法 5-点算法是指相机内参数已知的情况下,已知二幅图像之间的 5 组图像对应点,如何求取二幅图像之间的本质矩阵,进而分解出对应的旋转矩阵和平移向量的一种方法。 5-点算法由 David Nister 于 2004 年提出( Nister 2004),现已成为为基于图像的三维重建的一种广泛使用的方法。 5-点算法涉及大量的数学推导,有兴趣的学生可参阅这篇文章。
5-点算法尽管理论上比较复杂,也不能得到唯一解(最多有 10组解),但在具体应用中,不正确的解可以通过其它对应点快速剔除,且作者提供了算法代码,所以,目前基于图像的三维重建,人们基本都使用 5-点算法。
也许,人们会提的一个问题是,既然 5-点算法得到的多个解可以通过其它对应点剔除,为什么不直接用多组对应点求解本质矩阵呢?这样得到的解的个数会更少。当有 8-组对应点时,理论上可以得到唯一的本质矩阵。这主要是因为实际应用中,二幅图像之间会匹配到大量对应点,但这些对应点中有很多是错误对应点。为了提高估计的鲁棒性,人们一般在 RANSAC ( RANdom SAmplying Consensus ) (Fischler & Bolles 1981) 框架下进行估计,即反复提取待估计问题的最小点集( minimal set) , 然后对估计的结果进行验证,而 5-组对应点是能够求取本质矩阵的最小点集。
参考: http://vision.ia.ac.cn/zh/teaching/index.html 第四章
光束法平差(Bundle Adjustment)也可能翻译为束调整、捆集调整、捆绑调整,或者最小化重投影误差(高翔slam---第七讲)等等。
本质是一个优化模型(一个图优化模型),其目的是最小化重投影误差

光束:所谓bundle,来源于bundle of light,其本意就是指的光束,这些光束指的是三维空间中的点投影到像平面上的光束,而重投影误差,正是利用这些光束来构建的,因此称为光束法,强调光束也正是描述其优化模型是如何建立的。
平差:由于测量仪器的精度不完善和人为因素及外界条件的影响,测量误差总是不可避免的。为了提高成果的质量,处理好这些测量中存在的误差问题,实际观测值的个数,往往要多于确定未知量所必须观测的个数,也就是要进行多余观测。有了多余观测,势必在观测结果之间产生矛盾,测量平差的目的就在于消除这些矛盾而求得观测量的最可靠结果,并评定测量成果的精度。测量平差采用的原理就是“最小二乘法”。(百度词条)
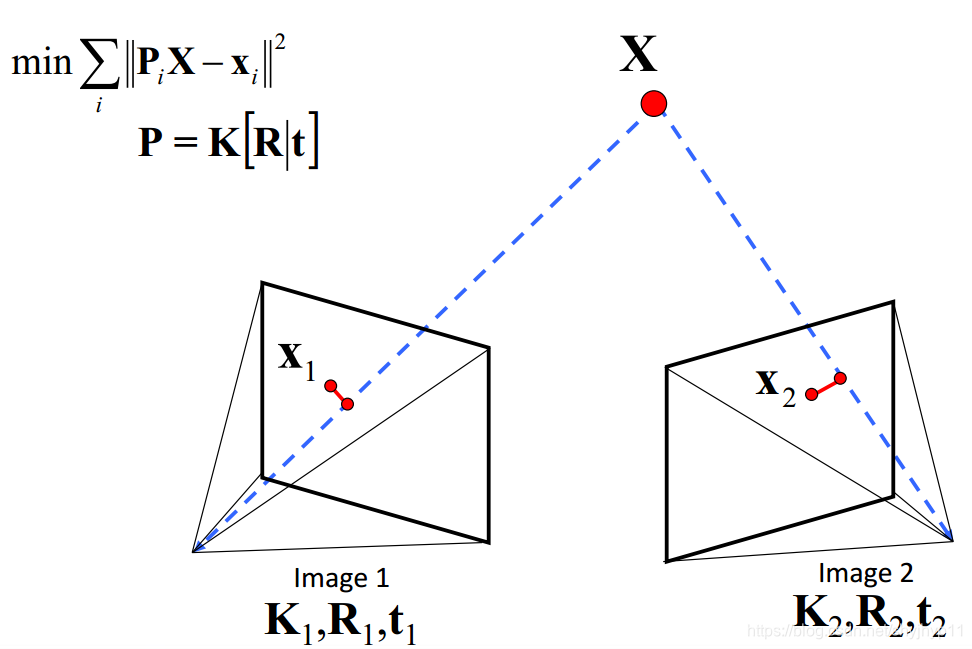
重投影:也就是指的第二次投影;第一次投影指的就是相机在拍照的时候三维空间点投影到图像上,然后我们利用这些图像对一些特征点进行三角定位(triangulation,很多地方翻译为三角化或者三角剖分等等,即利用几何信息构建三角形来确定三维空间点的位置,相关内容请参考对极几何);最后利用我们计算得到的三维点的坐标(注意不是真实的)和我们计算得到的相机矩阵(当然也不是真实的)进行第二次投影(第二次投影到图像平面上),通过最小化两次在图像平面上投影的误差,达到优化相机参数的目的。
Bundle adjustment优化的是sum of reprojection error(重投影误差的和),这是一个(geometric distance)几何距离[为什么要minimize geometric distance可以参考[Hartley00]],可以转换成一个least squares problem(最小二乘问题), 如果nosie是gaussian,那就是一个最大似然估计(maximum likelihood estimator),是这种情况下所能得到的最优解了。
这个reprojection error的公式是非线性的,所以这个least squares problem得用迭代法来求解:一般都是用Gauss-Newton 法或者LM算法迭代求解。
Bundle adjustmen由于是特定的形式,所以可以化成sparse matrix (稀疏矩阵)的形式,这样计算量大大减小了。不论GN,LM,中间都要解一个Ax=b形式的linear system,一般情况下算法的效率就取决于解这个linear system的效率。所以说到底,这些nonlinear least squares problem,最后也就是解一个linear system。这个linear system你可以直接解,也可以用QR分解,乔姆斯基分解 ,或者奇异值分解法来解。
现实中,并不是所有观测过程中的噪声都服从 gaussian noise的(或者可以说几乎没有),遇到有outlier的情况,这些方法非常容易挂掉,这时候就得用到robust statistics里面的robust cost(*cost也可以叫做loss, 统计学那边喜欢叫risk) function了,比较常用的有huber, cauchy等等。
- BA一种启发式的阻尼高斯牛顿法,在几何视觉中广泛使用
- BA有效性的关键在于提供理想的初始值
参考:Bundle Adjustment---即最小化重投影误差 https://www.cnblogs.com/Jessica-jie/p/7739775.html
Bundle Adjustment简述 https://blog.csdn.net/OptSolution/article/details/64442962
点云配准 ICP算法(迭代最近点)ICP算法能够使不同的坐标下的点云数据合并到同一个坐标系统中,首先是找到一个可用的变换,配准操作实际是要找到从坐标系1到坐标系2的一个刚性变换。
ICP算法本质上是基于最小二乘法的最优配准方法。该算法重复进行选择对应关系点对, 计算最优刚体变换,直到满足正确配准的收敛精度要求。
ICP 算法的目的是要找到,待配准点云数据与参考云数据之间的,旋转参数R和平移参数 T,使得两点数据之间满足某种度量准则下的最优匹配。

参考:https://www.cnblogs.com/haoyul/p/7979289.html


