ORB-SLAM2代码阅读笔记(一):从mono_kitti单目运行开始
运行实例:

系统框架:
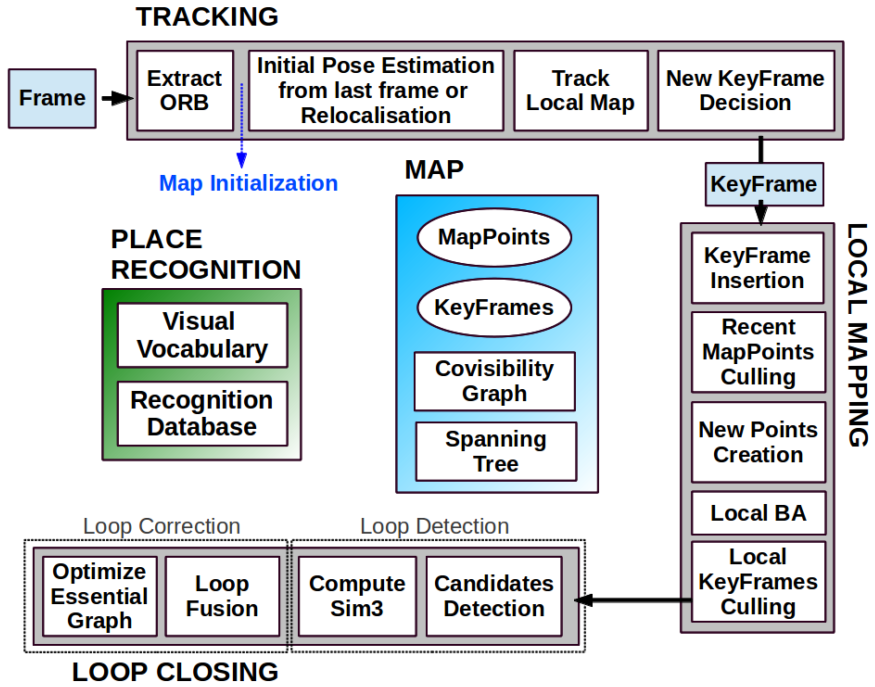
- 在只对SLAM的正常框架有所了解的前提下,我们可以看到
- TRACKING线程中做了提取ORB特征、初始位姿估计等操作,那么这个线程应该属于SLAM中的“前端VO”;
- LOCAL MAPPING线程里有Local BA,我们可以知道这个线程属于后端,主要做后端优化和建图工作;
- LOOP CLOSING线程从字面意思就能判断出是做回环检测的,分为回环检测和回环矫正。
- 再需要知道的就是TRACKING线程接收了一帧一帧的图片后开始工作的,而LOCAL MAPPING线程接收的KeyFrame来自TRACKING线程“加


