
目录
1.EVO安装
2.数据格式(data formal):TUM/EuRoC/Kitti数据集
3数据格式转换
3.1"把EuRoc的数据格式转化成TUM数据格式"
3.2"TUM数据转换成kitti格式"
3.3"TUM数据转换成bag格式"
4.evo使用
4.1 Plot multiple trajectories
4.2 Run a metric on trajectories
4.2.1 evo_ape
4.2.2 evo_rpe
4.4.3 Process multiple results from a metric
5. 轨迹对齐
参考:
1.EVO安装源代码地址:https://github.com/MichaelGrupp/evo
注意:安装好依赖!
sudo apt install python-pip
pip install evo --upgrade --no-binary evo
or
pip install evo --upgrade --no-binary evo --user
pip install numpy --upgrade --user2.数据格式(data formal):TUM/EuRoC/Kitti数据集
- 格式转换
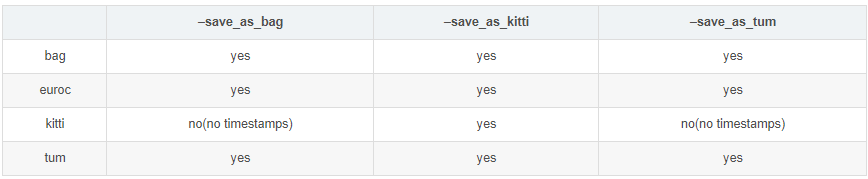
-
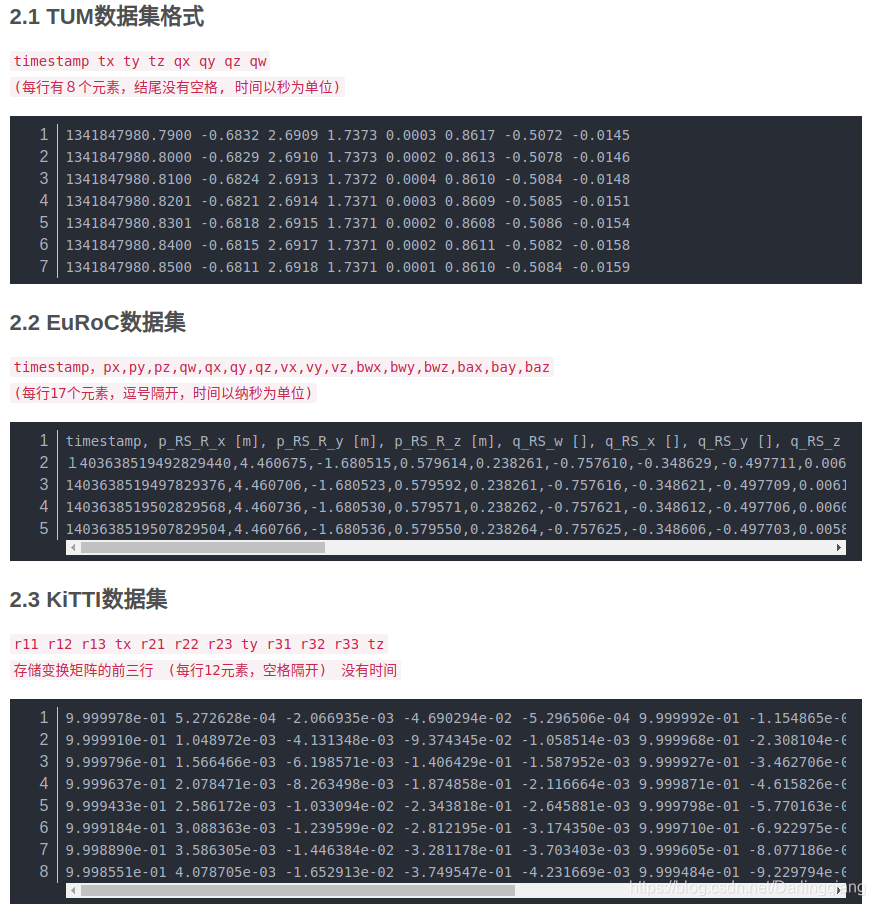

evo_traj euroc data.csv --save_as_tum将生成的 KeyFrameNavStateTrajectory.txt 文件,格式如下。总共17位 (timestamp;position3;q4;v3;bw3;ba3)

转化成符合TUM 形式的轨迹文件格式:8位
timestamp x y z q_x q_y q_z q_w![]()
evo_traj tum traj_1.txt traj_2.txt traj_3.txt --save_as_kitti- " 把一些文件的数据格式转化成rosbag"
evo_traj tum traj_1.txt traj_2.txt traj_3.txt --save_as_bag4.evo使用
evo_traj euroc v203_truth.csv --plot
- Here, we plot two KITTI pose files and the ground truth using
evo_traj:
cd test/data
evo_traj kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt --ref=KITTI_00_gt.txt -p --plot_mode=xz绝对位姿误差,常被用作绝对轨迹误差,比较估计轨迹和参考轨迹并计算整个轨迹的统计数据,适用于测试轨迹的全局一致性。 命令语法:命令 格式 参考轨迹 估计轨迹 [可选项] 其中格式包括euroc、tum等数据格式,可选项有对齐命令、画图、保存结果等。
For example, here we calculate the absolute pose error for two trajectories from ORB-SLAM and S-PTAM using evo_ape (KITTI_00_gt.txt is the reference (ground truth)) and plot and save the individual results to .zip files for evo_res:
-
mkdir results -
evo_ape kitti KITTI_00_gt.txt KITTI_00_ORB.txt -r full -
-va --plot --plot_mode xz --save_results results/ORB.zip
命令的含义为:计算考虑平移和旋转部分误差的ape,进行平移和旋转对齐,以详细模式显示,保存画图并保存计算结果。 命令运行后得到结果如下图所示

其中-r表示ape所基于的姿态关系

不添加-r/–pose_relation和可选项,则默认为trans_part。
-v表示verbose mode,详细模式,-a表示采用SE(3) Umeyama对齐,其余可选项如下表所示。不加-s表示默认尺度对齐参数为1.0,即不进行尺度对齐。

详情:
可通过 evo_ape +数据格式 + --help查看更多参数的含义以及如何使用。例如 evo_ape euroc --help
4.2.2 evo_rpe相对位姿误差不进行绝对位姿的比较,相对位姿误差比较运动(姿态增量)。相对位姿误差可以给出局部精度,例如slam系统每米的平移或者旋转漂移量。
命令语法:命令 格式 参考轨迹 估计轨迹 [可选项] 其中格式包括euroc、tum等数据格式,可选项有对齐命令、画图、保存结果等。 常用命令示例:
-
evo_rpe euroc data.csv V102.txt -r angle_deg --delta 1 --delta_unit m -
-va --plot --plot_mode xyz --save_plot ./VIO --save_results ./VIO.zip
命令的含义为 求每米考虑旋转角的rpe,以详细模式显示并画图。 命令运行后得到结果如下图所示
其中-r表示ape所基于的姿态关系

不添加-r/–pose_relation和可选项,则默认为trans_part。 –d/–delta表示相对位姿之间的增量,–u/–delta_unit表示增量的单位,可选参数为[f, d, r, m],分别表示[frames, deg, rad, meters]。–d/–delta -u/–delta_unit合起来表示衡量局部精度的单位,如每米,每弧度,每百米等。其中–delta_unit为f时,–delta的参数必须为整形,其余情况下可以为浮点型。–delta 默认为1,–delta_unit默认为f。 -v --plot --plot_mode xyz --save_results results/VINS.zip --save_plot等同evo_ape中所讲。 当在命令中加上–all_pairs,则计算rpe时使用位置数据中所有的对而不是仅连续对,此时,可以通过-t/–delta_tol控制–all_pairs模式下的相对增量的容差(relative delta tolerance)。需要注意–all_pairs下不能使用–plot函数。 可通过 evo_rpe +数据格式 + --help查看更多参数的含义以及如何使用。例如 evo_rpe euroc --help
4.4.3 Process multiple results from a metricevo_res can be used to compare multiple result files from the metrics, i.e
- print infos and statistics (default)
- plot the results
- save the statistics in a table
Here, we use the results from above to generate a plot and a table:
evo_ape/evo_rpe中将结果保存为.zip文件后,可以利用evo_res对不同的结果进行比较。
evo_res results/*.zip -p --save_table results/table.csvevo_res --help可查看可选参数含义。
evo其他常用命令

结果如下所示:

当轨迹使用不同的传感器坐标系,或者轨迹之间有旋转平移等变换时,可以使用 "--align" 参数进行轨迹对齐, 使用 "--correct_scale"进行轨迹放缩。一个例子,如下面的命令所示。
注意:
- 这里对比的轨迹,应该具有相同数量的位姿(相同数量的行),当然也应该是相同数量的列(位姿的表示方法相同)
- 同时使用align参数,应该指定reference(即指定"--ref"参数)
-
evo_traj tum KeyFrameTrajectory.txt --ref=KITTI_02_gt.txt -p --plot_mode=xz --correct_scale --align
- 官网 https://github.com/MichaelGrupp/evo
- evo安装、evo使用方法详细介绍使用教程
-
SLAM数据集(tum/kitti)轨迹对齐与结果评估

