布隆过滤器(Bloom Filter)是由布隆(Burton Howard Bloom)在1970年提出的。它实际上是由一个很长的二进制向量和一系列随机映射函数组成,布隆过滤器可以用于检索一个元素是否在一个集合中。它的优点是空间效率和查询时间都远远超过一般的算法,缺点是有一定的误识别率(假正例False positives,即Bloom Filter报告某一元素存在于某集合中,但是实际上该元素并不在集合中)和删除困难,但是没有识别错误的情形(即假反例False negatives,如果某个元素确实没有在该集合中,那么Bloom Filter 是不会报告该元素存在于集合中的,所以不会漏报)。
在日常生活中,包括在设计计算机软件时,我们经常要判断一个元素是否在一个集合中。比如在字处理软件中,需要检查一个英语单词是否拼写正确(也就是要判断 它是否在已知的字典中);在 FBI,一个嫌疑人的名字是否已经在嫌疑名单上;在网络爬虫里,一个网址是否被访问过等等。最直接的方法就是将集合中全部的元素存在计算机中,遇到一个新元素时,将它和集合中的元素直接比较即可。一般来讲,计算机中的集合是用哈希表(hash table)来存储的。它的好处是快速准确,缺点是费存储空间。当集合比较小时,这个问题不显著,但是当集合巨大时,哈希表存储效率低的问题就显现出来了。
如果想判断一个元素是不是在一个集合里,一般想到的是将所有元素保存起来,然后通过比较确定。链表,树等等数据结构都是这种思路. 但是随着集合中元素的增加,我们需要的存储空间越来越大,检索速度也越来越慢。不过世界上还有一种叫作散列表(又叫哈希表,Hash table)的数据结构。它可以通过一个Hash函数将一个元素映射成一个位阵列(Bit Array)中的一个点。这样一来,我们只要看看这个点是不是 1 就知道可以集合中有没有它了。这就是布隆过滤器的基本思想。
Hash面临的问题就是冲突。假设 Hash 函数是良好的,如果我们的位阵列长度为 m 个点,那么如果我们想将冲突率降低到例如 1%, 这个散列表就只能容纳 m/100 个元素。显然这就不叫空间有效了(Space-efficient)。解决方法也简单,就是使用多个 Hash,如果它们有一个说元素不在集合中,那肯定就不在。如果它们都说在,虽然也有一定可能性它们在说谎,不过直觉上判断这种事情的概率是比较低的。
直观的说,bloom算法类似一个hash set,用来判断某个元素(key)是否在某个集合中。 和一般的hash set不同的是,这个算法无需存储key的值,对于每个key,只需要k个比特位,每个存储一个标志,用来判断key是否在集合中。
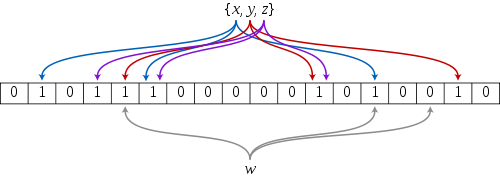
算法:- 1. 首先需要k个hash函数,每个函数可以把key散列成为1个整数
- 2. 初始化时,需要一个长度为n比特的数组,每个比特位初始化为0
- 3. 某个key加入集合时,用k个hash函数计算出k个散列值,并把数组中对应的比特位置为1
- 4. 判断某个key是否在集合时,用k个hash函数计算出k个散列值,并查询数组中对应的比特位,如果所有的比特位都是1,认为在集合中。
- 不需要存储key,节省空间
相比于其它的数据结构,布隆过滤器在空间和时间方面都有巨大的优势。布隆过滤器存储空间和插入/查询时间都是常数。另外, Hash 函数相互之间没有关系,方便由硬件并行实现。布隆过滤器不需要存储元素本身,在某些对保密要求非常严格的场合有优势。
布隆过滤器可以表示全集,其它任何数据结构都不能;
k 和 m 相同,使用同一组 Hash 函数的两个布隆过滤器的交并差运算可以使用位操作进行。
缺点:- 算法判断key在集合中时,有一定的概率key其实不在集合中
- 无法删除
但是布隆过滤器的缺点和优点一样明显。误算率(False Positive)是其中之一。随着存入的元素数量增加,误算率随之增加。但是如果元素数量太少,则使用散列表足矣。
另外,一般情况下不能从布隆过滤器中删除元素. 我们很容易想到把位列阵变成整数数组,每插入一个元素相应的计数器加1, 这样删除元素时将计数器减掉就可以了。然而要保证安全的删除元素并非如此简单。首先我们必须保证删除的元素的确在布隆过滤器里面. 这一点单凭这个过滤器是无法保证的。另外计数器回绕也会造成问题。
应用场景:某些存储系统的设计中,会存在空查询缺陷:当查询一个不存在的key时,需要访问慢设备,导致效率低下。
比如一个前端页面的缓存系统,可能这样设计:先查询某个页面在本地是否存在,如果存在就直接返回,如果不存在,就从后端获取。但是当频繁从缓存系统查询一个页面时,缓存系统将会频繁请求后端,把压力导入后端。
这是只要增加一个bloom算法的服务,后端插入一个key时,在这个服务中设置一次 需要查询后端时,先判断key在后端是否存在,这样就能避免后端的压力。