
上一篇文章
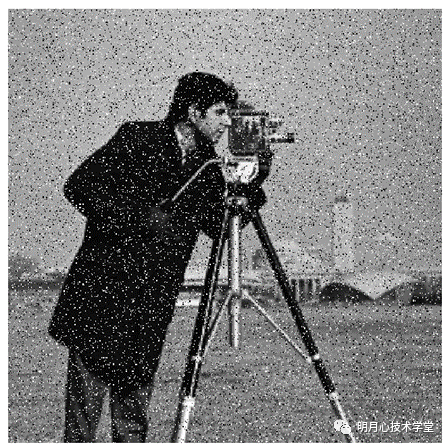
在图像处理领域中,在真正的应用过程前,通常需要对图像进行预先处理,达到去除干扰项的目的。滤波去噪就是其中的一项图像预处理工作。
在.NET下常用OpenCV进行图像处理工作,常用的.NET下的OpenCV库有Emgu CV和OpenCVSharp。
EmguCV是.NET平台下对OpenCV图像处理库的封装,也就是.NET版的OpenCV。由于OpenCV是用C和C++编写的,Emgu用C#对其进行封装,允许用.Net语言来调用OpenCV函数,如C#、VB、VC++等。
OpenCvSharp 是一个OpenCV的.Net wrapper,应用最新的OpenCV库开发,使用习惯比EmguCV更接近原始的OpenCV,有详细的使用样例供参考。。使用OpenCvSharp,可用C#,VB.NET等语言实现多种流行的图像处理(image processing)与计算机视觉(computer vision)算法。
本文将介绍利用Emgu CV进行图像处理滤波去噪的常用方法。
一、 中值滤波
Image image = Image.FromFile("xx.jpg");
Image img = new Image((Bitmap)image);//实例化一个三通道的OPENCV的图像对象
Int k=3;//滤波核,奇数
img =img.SmoothMedian(k);//按照指定的滤波核进行中值滤波
Bitmap bitmap= img.Bitmap;//输出Bitmap格式的结果原图

二、 高斯滤波
Image image = Image.FromFile("xx.jpg");
Image img = new Image((Bitmap)image);//实例化一个三通道的OPENCV的图像对象
Int k=3;//滤波核,奇数
img = img. SmoothGaussian (k);//按照指定的滤波核进行高斯滤波
Bitmap bitmap= img.Bitmap;//输出Bitmap格式的结果

三、 均值滤波
Image image = Image.FromFile("xx.jpg");
Image img = new Image((Bitmap)image);//实例化一个三通道的OPENCV的图像对象
Int k=3;//滤波核,奇数
img = img. SmoothBlur (k,k);//按照指定的滤波核进行均值滤波
Bitmap bitmap= img.Bitmap;//输出Bitmap格式的结果
四、 方框滤波
Image image = Image.FromFile("xx.jpg");
Image img = new Image((Bitmap)image);//实例化一个三通道的OPENCV的图像对象
Int k=3;//滤波核,奇数
CvInvoke.BoxFilter(img, img, DepthType.Default, new Size(k, k), new Point(-1, -1));//按照指定的滤波核进行方框滤波
Bitmap bitmap= img.Bitmap;//输出Bitmap格式的结果
五、 双边滤波
Image image = Image.FromFile("xx.jpg");
Image img = new Image((Bitmap)image);//实例化一个三通道的OPENCV的图像对象
Int k=3;//滤波核,奇数
CvInvoke.EdgePreservingFilter(img, img, EdgePreservingFilterFlag.NormconvFilter, k, 0.4f);;//按照指定的滤波核进行双边滤波
Bitmap bitmap= img.Bitmap;//输出Bitmap格式的结果 CvInvoke.FastNlMeansDenoising(img, img);
色彩聚类平滑滤波 用于区域分割
CvInvoke.PyrMeanShiftFiltering(img, img,5, 5, 2, newMCvTermCriteria(2));

///
///离散余弦变换(Dct)滤波
///
/// 图像加载到opencv的mat数据格式
///
public static Mat Dct(Mat mat)
{
if (mat.NumberOfChannels < 3)//单通道图像,即二值化图或者灰度图
{
if (mat.Size.Height % 2 != 0)//图像长宽需要为偶数,如果不是则进行扩边处理
{
CvInvoke.CopyMakeBorder(mat, mat, 0, 1, 0, 0, BorderType.Constant);
}
if (mat.Size.Width % 2 != 0) //图像长宽需要为偶数,如果不是则进行扩边处理
{
CvInvoke.CopyMakeBorder(mat, mat, 0, 0, 0, 1, BorderType.Constant);
}
Mat matdst = new Mat();
Emgu.CV.XPhoto.XPhotoInvoke.DctDenoising(mat, matdst, 8);
return matdst;
}
else
{
Mat[] Matbgr = mat.Split();//三通道图像,需要拆分三个独立的单通道进行处理,
for (int i = 0; i < Matbgr.Length; i++)
{
Matbgr[i] = Dct(Matbgr[i]);//按单通道处理
}
List listmat = new List();
for (int i = 0; i < Matbgr.Length; i++)
{
listmat.Add(Matbgr[i]);
}
VectorOfMat vm = new VectorOfMat(listmat.ToArray());//合并处理后的通道
CvInvoke.Merge(vm, mat);
return mat;
}
}
思路:
-
图像转成灰度
-
计算灰度平均值
-
以灰度平均值作为临界点进行二值化处理
-
轮廓检测
-
遍历所有的轮廓,得到每个轮廓的矩形范围(一般就是每个噪声点的范围)
-
判断每个矩形的长宽是否小于给定值,并用白色在原来的图像上进行填充,即把认为是噪点的范围用白色颜色填充
-
返回处理后的图像
Image image = Image.FromFile("xx.jpg");
Int k=5;//滤波核,
Image img = new Image((Bitmap)image);
Image gray = img.Convert();
Gray average = gray.GetAverage();//平均值
CvInvoke.Threshold(gray, gray, average.MCvScalar.V0 - average.MCvScalar.V0 * 0.2, 255, ThresholdType.Binary);//二值化
using (VectorOfVectorOfPoint contours = new VectorOfVectorOfPoint())
{
CvInvoke.FindContours(gray, contours, gray, RetrType.List, ChainApproxMethod.ChainApproxSimple);
int count = contours.Size;
for (int i = 0; i < count; i++)
{
using (VectorOfPoint contour = contours[i])
using (VectorOfPoint approxContour = new VectorOfPoint())
{
Rectangle rec = CvInvoke.BoundingRectangle(contour);
if (rec.Width
关注
打赏
最近更新
- 深拷贝和浅拷贝的区别(重点)
- 【Vue】走进Vue框架世界
- 【云服务器】项目部署—搭建网站—vue电商后台管理系统
- 【React介绍】 一文带你深入React
- 【React】React组件实例的三大属性之state,props,refs(你学废了吗)
- 【脚手架VueCLI】从零开始,创建一个VUE项目
- 【React】深入理解React组件生命周期----图文详解(含代码)
- 【React】DOM的Diffing算法是什么?以及DOM中key的作用----经典面试题
- 【React】1_使用React脚手架创建项目步骤--------详解(含项目结构说明)
- 【React】2_如何使用react脚手架写一个简单的页面?

