- 操作过程 1.1. NC配置 首先是需要把驱动器、NC轴和PLC的基本操作配置好,使伺服能够正常点动、定位启动等。关于NC操作这边不做阐述

1.2. 加减速设置 伺服PDI调整的基本思路是,先把加减速和加加速度弄得比较大,然后让电机以一个速度来回运动,通过轴的运动曲线动态调整伺服的参数,因此首先是把加减速时间设置,如下: 
1.3. 示波器添加轴的曲线 通过示波器观察运动过程中的波形图,主要有实际位置、实际速度,指令位置、指令速度和跟随误差等,如下所示:

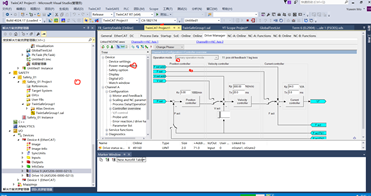
1.4. 经常调节的PDI参数 速度环Kv,位置环Kp,时间积分Tn,具体参数位置如下