使用第三方伺服,除了需要相关的电机文件外,还需要手动配置一些启动的COE参数,比如控制模式、电机正反转方向、伺服数字输入端子等,本文以汇川伺服为例配置启动时的COE参数。
-
操作流程 1.1. IS620N介绍 IS620N是汇川生产的伺服系统,支持EthercAT协议,其外观如下所示。

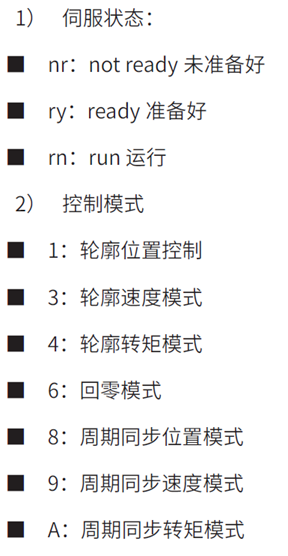
面板上面显示伺服的各种状态,具体的含义如下所示


线路的连接分为:主回路连接、控制回路连接、编码器连接和动力线连接,其接线和调试的线路连接如下所示: 
1.2. 扫描IO 接好线后,添加电机文件,在Twincat2中扫描IO,即可显示IS620N的伺服,如下所示: 首先是基本的PDO参数配置,有些是连接了NC轴之后就默认配置了,有些是需要手动链接如Digital inputs这些,其限位限号、原点就是通过Digital inputs输入到配置中。 
PDO参数的添加:在右下区域右键—》insert选择需要的PDO参数添加即可。具体如下所示:

1.3. 启动项COE参数添加 StartUP选项的含义就是在PLC启动的时候,会往伺服写一次COE参数,这样做的目的是机器启动时候设置好一些伺服参数,防止被修改。比如轴的控制模式、极限信号的常开常闭等。如下所示 
对于旋转方向,也可在NC轴上通过编码器和电机方向取反实现: 
1.4. 相关参数查询 对于COE 参数,需要看伺服的手册才能知道每个参数的含义,然后结合手册选择相对应的启动参数。例如,伺服的模式选择是6060h,伺服数字输入端子的常开常闭选择是2003,如下所示: 

在添加完COE参数后,激活配置,设备重新上电,即可使参数生效。
https://www.nowcoder.com/link/pc_csdncpt_gglldjr_plc
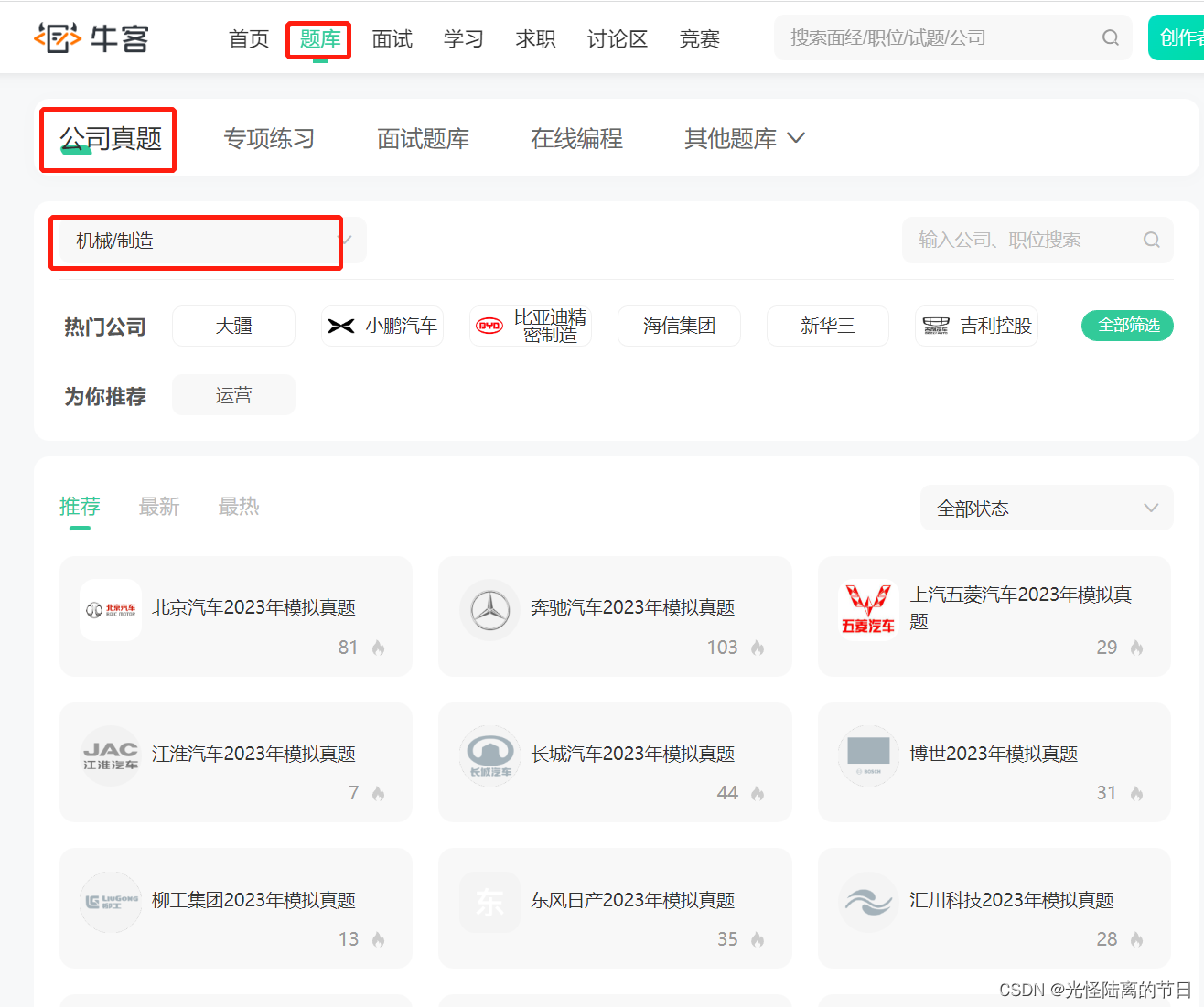
机械相关的题目在“专项”里,链接只能跳转到专项首页,需要手动选择一下。 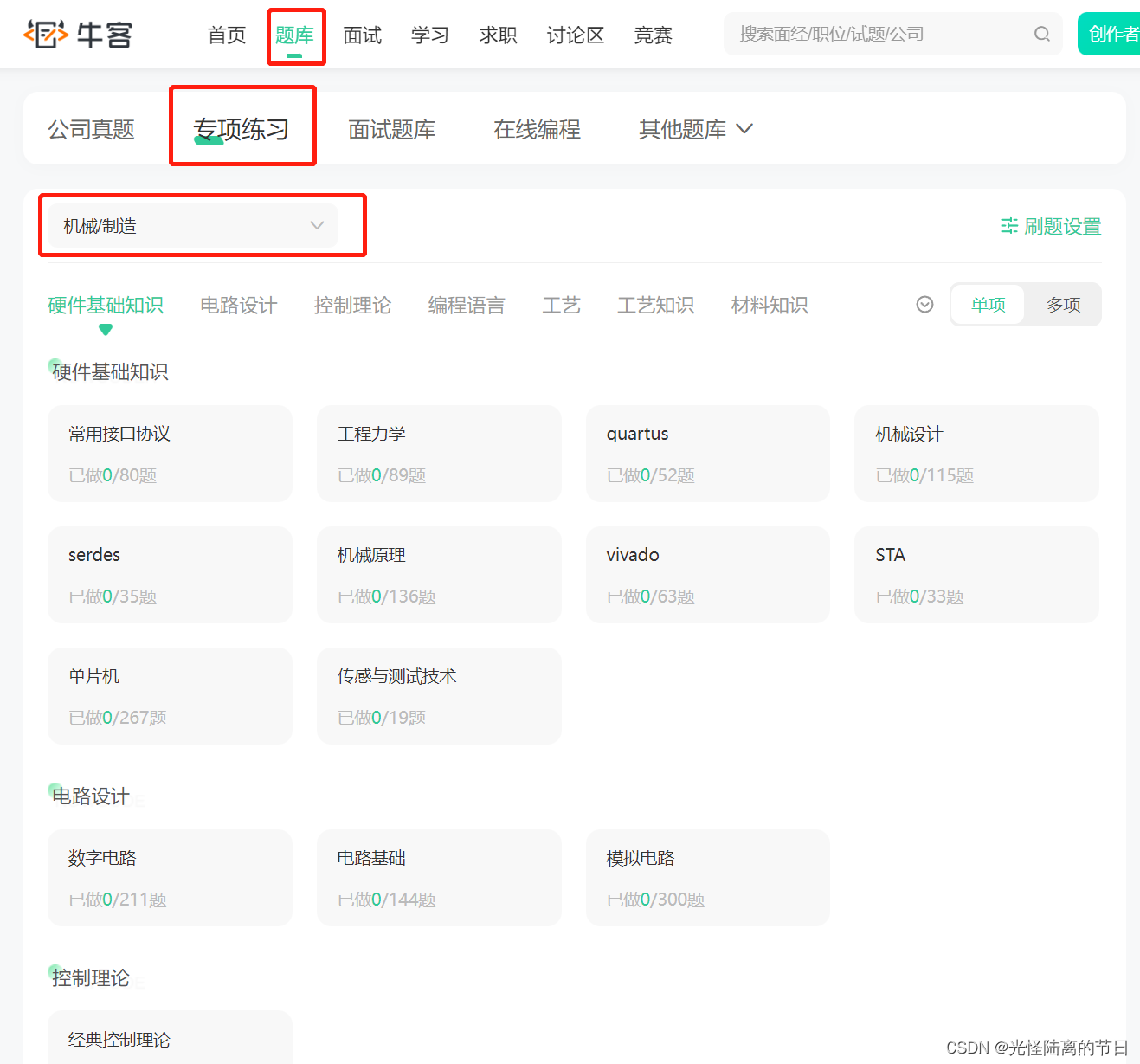 2、公司真题 https://www.nowcoder.com/link/pc_csdncpt_gglldjr_gstk
2、公司真题 https://www.nowcoder.com/link/pc_csdncpt_gglldjr_gstk
机械相关的题目在“专项”里,链接只能跳转到专项首页,需要手动选择一下