
本文介绍Position Bias怎么在TC3的程序设定绝对值编码器的。如何完成绝对位置和设备的标定。保证断电后依然保持位置。
- 操作流程 1.1. 倍福Beckhoff 配置设置bias值:首先将轴移动到设备的原点(如果用MC_Home执行后一定要再执行绝对定位移动到0),在Position Bias默认为0时,获取记录当前NC位置值中的数值(执行搜原点后必须重启设备才能获取),将数值取负放到Position Bias后激活,就可以完成绝对位置和设备的标定。效果为断电后,重启后显示的位置值与设置值进行补偿,这样原点依旧唯一有效。
举例: 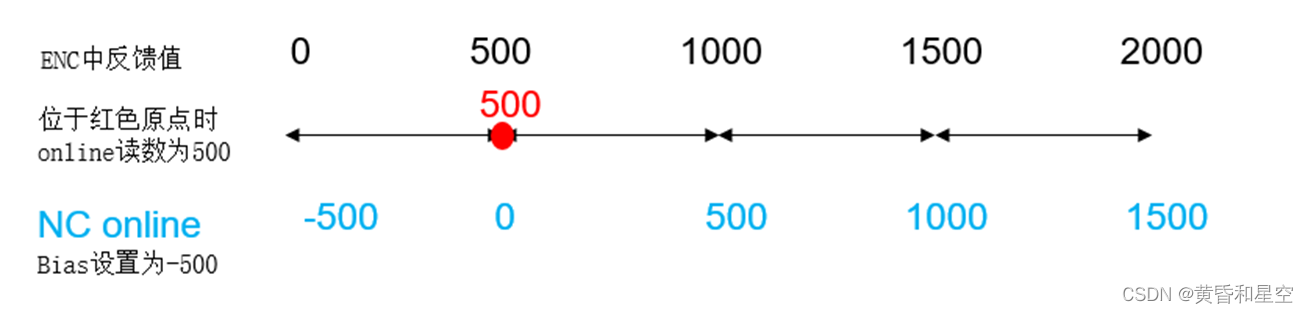 轴停在原点位置时显示为500,那么position bias中需要设置为-500,设备重启后,如果轴在一个新的位置读到1000的话,它表示当前位置与原点的坐标关系时+1000,原理是它编码器反馈给NC的值时1500,因为原点的参考位进行了-500的补偿。
轴停在原点位置时显示为500,那么position bias中需要设置为-500,设备重启后,如果轴在一个新的位置读到1000的话,它表示当前位置与原点的坐标关系时+1000,原理是它编码器反馈给NC的值时1500,因为原点的参考位进行了-500的补偿。 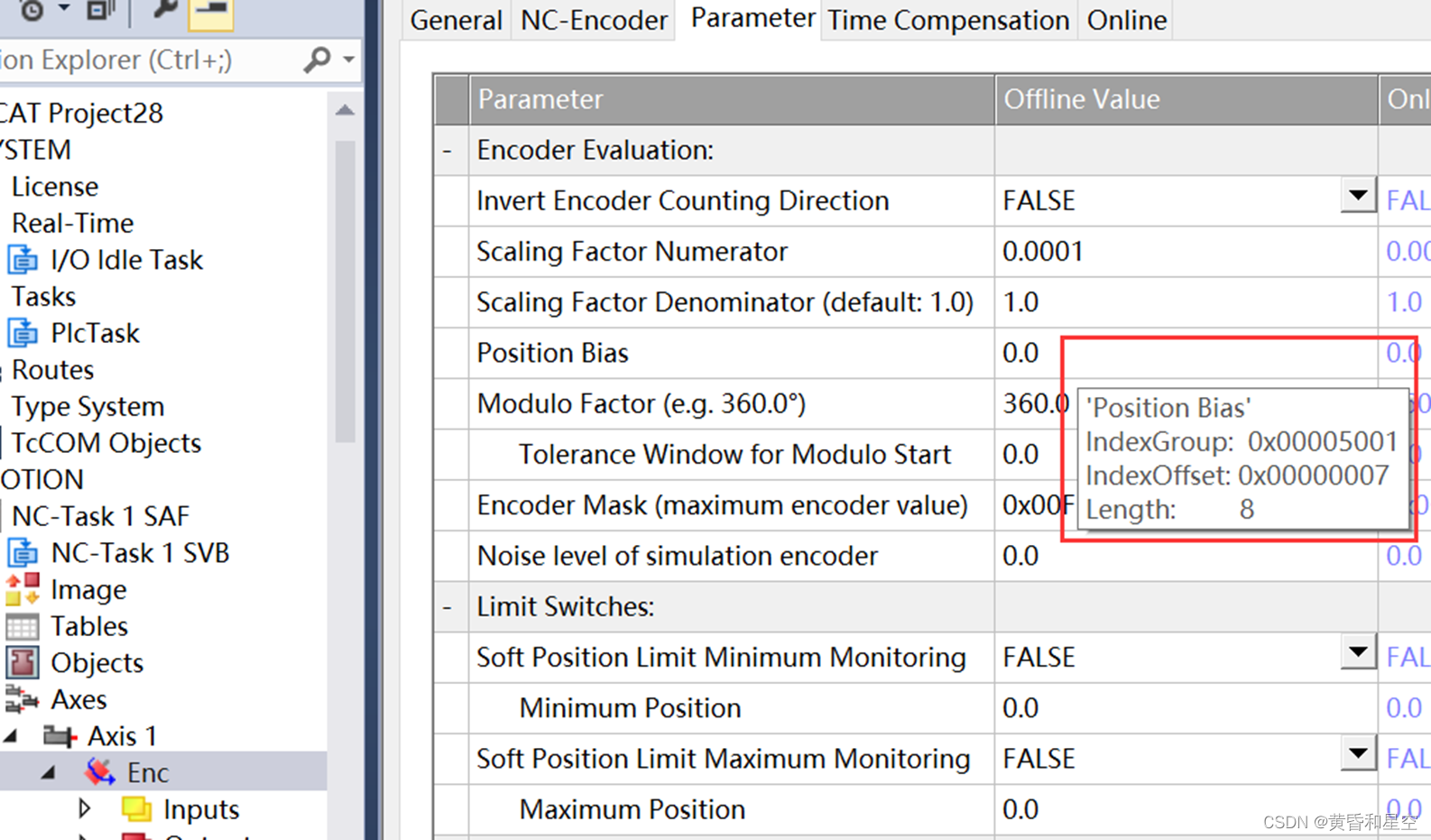 程序设置Position Bias: 使用指令mc_writeparameterpersistent;该指令TC3独有的,特征为修改后保存至配置中,断电依旧有效。使用要注意在轴未使能时修改有效。如果是TC2希望依靠指令修改可以使用mc_writeparameter,该指令写入值断电后会丢失,所以使用时需要每次上电重新触发。 mc_writepar
程序设置Position Bias: 使用指令mc_writeparameterpersistent;该指令TC3独有的,特征为修改后保存至配置中,断电依旧有效。使用要注意在轴未使能时修改有效。如果是TC2希望依靠指令修改可以使用mc_writeparameter,该指令写入值断电后会丢失,所以使用时需要每次上电重新触发。 mc_writepar

