目录
【功能介绍】
【原理图】
【PCB】
【实物图】
【元器件清单】
【源代码】
【参考资料】
【参考文献】
【功能介绍】本设计利用51单片机为主控系统,采用三轴加速度传感器ADXL345进行倾角测量,可以实现两大功能:
- 实时显示当前测量的角度值;
- 可以设置角度报警值,到达设定角度进行报警功能。
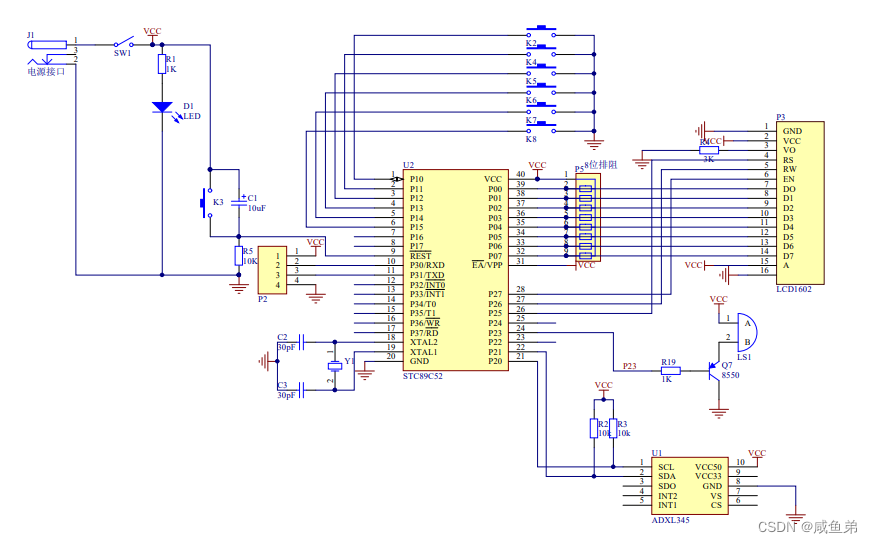
原理图中包含单片机最小系统,按键电路,显示模块,电源模块,蜂鸣器模块,倾角检测模块等;如需详细资料可私信作者或加微信biyezhan007
【PCB】

#include //头文件调用
#include "ADXL345.h" //调用倾角传感器的控制程序函数
#include "LCD1602.h" //调用LCD1602 的显示控制函数
#include "eeprom52.h" //调用LCD1602 的显示控制函数
#define uchar unsigned char //简化宏定义
#define uint unsigned int //简化宏定义
sbit Key_1=P1^0; //校零按键定义IO口
sbit Key_2=P1^1; //绝对校零按键定义IO口
sbit Key_3=P1^2; //暂停显示控制按键
sbit Key_4=P1^3;
sbit Key_5=P1^4;
sbit Key_6=P1^5;
sbit Beep=P2^3; //蜂鸣器标志位
bit angle_flag=0; //判断处于绝对角度还是相对角度 ,angle_flag=0绝对角度显示 Absolute angle、 =1相对显示 relative angle
int xDat,yDat,zDat; //倾角度传感器的暂存数据变量
int x,y,z; //角度数据滤波计算暂存变量
int xNum,yNum,zNum; //角度数据滤波计算暂存变量
int ShowDatx,ShowDaty,ShowDatz; //滤波后的角度数据变量
bit SysError,key1,key2,key3,key4,key5,key6,SysMode; //系统错误标志位,按键控制3个标志位,系统显示状态标志位
uint ButtonTime=0; //按键等待延时变量
int AngleDat,Dat1AngleDat; //实时角度值暂存变量
int AngleDat_value=0;
float AngleDatx,CalibrationDat; //实际角度值、校准角度值
uchar state,ms; //数据显示变量,定时变量
bit s1,Beep1; //数据闪烁标志位,蜂鸣器报警标志位
/*
无论是什么单片机,只要是用内部存储区域EEPROM基本使用都是这样
关于内部存储区,EEPROM,不同的单片机使用流程基本一致,单片机内部有很多存储单元,或者说扇区,每一个扇区下面有很多地址,
数据就是存储在这些地址下面的。存储函数的程序都是官方提供好的,这些程序,咱们只需要用三个,一个是扇区擦除函数,一个是
数据写函数,还有一个就是数据读取函数。
扇区擦除函数------使用哪个扇区,先对那个扇区进行擦,函数里填写要擦除扇区的首地址 例如 SectorErase(0x2000);就是说擦除首地址为0x2000的扇区数据
数据存储----------扇区擦除之后,就可以使用这个扇区下的地址进行存储数据 例如 byte_write(0x2000,123); 就是说将123存储在0x2000地址下
数据读取----------直接调用即可,例如 Dat=byte_read(0x2000);就是说将0x2000地址下的数据读取出来给 Dat
另外----
//51单片机存储区域是8位的,也就是说能够存下的最大数据是 255,而我们存的数据一旦大于256就会出现一些问题
//所以,如果您的设计需要存储的数据大于256,那就把数据拆开存 /256得到高位 %256得到低位,之所以是256,是因为0-255,256个数
// 例如数据257 257/256=1 257%256=1 ,这就存进去两个1,读取的时候,将高位数据乘以256加低位数据,还原数据
*/
//按键处理函数,平常按键处理是,判断按键按下,延时消抖,再次判断,然后按键死循环等待释放,但是这样会有
//一些问题,就是如果我按键一直按下,不松开,就会一直等待按键释放,程序就会死在那,所以就不用这种按键处理
//换了一种变量判断形势的,比如说我将一个变量在按键不按下的时候等于0,按键按下的时候进行累加,当数值累加到
//一定程度,再次判断按键是否按下,如果按键真的按下,就执行,这种思路
void ButtonCode() //系统按键控制函数
{
if(!Key_2) //恢复绝对零度的校准值
{
CalibrationDat=0; //清除校0标志位
angle_flag=0;
}
if(!Key_1) //校准零度 记录在绝对零度下的 角度值 (重要)
{
if(ButtonTime4) //变量加到四之后,就进行再次判断按键是否按下
{
if(!key1) //是按键按下,只要这个变量等于1,就执行一次按键操作,并且变量清零,确保执行一次
{
key1=1;
CalibrationDat=AngleDatx; //校零时记录当前系统的角度值
angle_flag=1;
}
}else key1=0;
}else if(!Key_3)
{
if(ButtonTime4)
{
if(!key3)
{
key3=1;
SysMode=!SysMode; //显示角度锁定状态标志位置位
}
}else key3=0;
}else if(!Key_4) //校准零度 记录在绝对零度下的 角度值 (重要)
{
if(ButtonTime4)
{
if(!key4)
{
key4=1;
state=(state+1)%2;
}
}else key4=0;
}else if(!Key_5)
{
if(ButtonTime4)
{
if(ButtonTime>80)
{
ButtonTime=75;
key5=0;
}
if(!key5)
{
key5=1;
if(state==1)
{
if(Dat1AngleDat80)
{
ButtonTime=75;
key6=0;
}
if(!key6)
{
key6=1;
if(state==1)
{
if(Dat1AngleDat>0)
{
Dat1AngleDat--;
SectorErase(0x2000);
byte_write(0x2000,Dat1AngleDat);
}
}
}
}else key6=0;
}else ButtonTime=0;
}
/*
1602液晶,是常用的显示器件,一共是16个管脚,其中有八个管脚是数据传输管脚,有三个管脚是数据命令使能端管脚,还有两组电源管脚,
其中一组电源管脚是给整个液晶进行供电的,还有一组电源是单纯的背景光电源,还剩下的最后一个管脚是对比度调节管脚,一般接上一个3K电
阻再接地即可。
一般我们用的函数,无非就是 LCD1602_write 和 LCD1602_writebyte
LCD1602_write(x,y); 这个函数括号里面可以填写两个数据,第一个数据只能是 0 1 ,是0就说明第二个数据对液晶来说就是命令,填1就说明
第二个数据对于液晶来说就是要显示的数据。
LCD1602_writebyte(); 这个函数里面直接填上要显示的字符串即可,自动进行显示
*/
void ShowCode() //显示控制函数
{
if(ShowDaty>=0) //判断当前系统设备当前角度处于正半轴还是负半轴 //计算绝对零度时的 角度数据
{
if(ShowDatz>=0) //判断当前角度是否为0°-90° / 还是90°-180°的饭
{
AngleDatx=(float)ShowDaty*90/257; //计算当前角度值0-90 (当前角度=Y周角度数据*90° / Y轴最大90°时对应的角度数据)
}else
{
AngleDatx=((float)2570-ShowDaty)*90/257+900; //计算当前角度值90-180 (当前角度=Y周角度数据*90° / Y轴最大90°时对应的角度数据+90°)-
}
}else
{
if(ShowDatz>=0) //判断当前角度是否为-0°→ -90° / 还是-90° → -180°的饭
{
AngleDatx=(float)ShowDaty*90/257; //计算当前角度值0--90 (当前角度=Y周角度数据*90° / Y轴最大90°时对应的角度数据)
}else
{
AngleDatx=(float)((ShowDaty*-1)-2570)*90/257-900; //计算当前角度值90-180 (当前角度=Y周角度数据*90° / Y轴最大90°时对应的角度数据-90°)-
}
}
ButtonCode(); //调用按键控制程序
AngleDatx=AngleDatx-CalibrationDat; //零点校准部分程序
if(AngleDatx>1800) //角度值划分 超限制计算实际角度值
{
AngleDatx=-1800+(AngleDatx-1800); //角度值划分 超限制计算实际角度值
}else if(AngleDat
关注
打赏
最近更新
- 深拷贝和浅拷贝的区别(重点)
- 【Vue】走进Vue框架世界
- 【云服务器】项目部署—搭建网站—vue电商后台管理系统
- 【React介绍】 一文带你深入React
- 【React】React组件实例的三大属性之state,props,refs(你学废了吗)
- 【脚手架VueCLI】从零开始,创建一个VUE项目
- 【React】深入理解React组件生命周期----图文详解(含代码)
- 【React】DOM的Diffing算法是什么?以及DOM中key的作用----经典面试题
- 【React】1_使用React脚手架创建项目步骤--------详解(含项目结构说明)
- 【React】2_如何使用react脚手架写一个简单的页面?

