
前言
关于矩阵运算规则,我们在前面已经讲过
Matrix在绘图方面,很多地方都能用到,不同的矩阵,格式不一样,功能也不一样
像我们前面提到的ColorMatrix,可以用来进行色彩变换
此外,Matrix还可以应用于画笔,画布,它能将本来应该绘制在(x,y)位置的坐标,自动转为(x’,y’)
试想,如果没有Matrix帮我们自动转换,我们做个旋转,拉伸,平移,都要自己去处理,那真是太恐怖了
Matrix本身不难,前面我们也已经用到过不少次
这篇博客,主要是为了给大家讲解下,Matrix底层的具体实现规则和工作原理
这样等大家以后技术上去了,自己也可以利用矩阵去解决一些图形变换类的工作
Canvas中的Matrix格式
Canvas中的Matrix是一个3*3的矩阵,格式如下
[ s c a l e X s k e w X t r a n X s k e w Y s c a l e Y t r a n Y p e r s p 1 p e r s p 2 p e r s p 3 ] \begin{bmatrix} &scaleX &skewX &tranX&\\ &skewY &scaleY &tranY&\\ &persp1 &persp2 &persp3&\\ \end{bmatrix} ⎣⎡scaleXskewYpersp1skewXscaleYpersp2tranXtranYpersp3⎦⎤
scale用于缩放,skew用于错切,tran用于平移
并没有提供rotate参数来进行旋转,因为通过scale和skew的组合,也可以实现rotate的功能
persp参数是用于3D透视的,二维绘图不用考虑,persp3永远为1,其它两个永远为0
Matrix坐标转换公式
以下是Matrix坐标转换公式
知道公式后,我们给矩阵中的变量,设置合适的值,就能达到缩放,错切,平移,旋转等功能了
这个并不难,几何好的同学,自己想象下也能推导出来
当然,我会照顾到所有人,下面会给出每种效果的具体矩阵值
[ x ′ y ′ 1 ] = [ s c a l e X s k e w X t r a n X s k e w Y s c a l e Y t r a n Y p e r s p 1 p e r s p 2 p e r s p 3 ] ∗ [ x y 1 ] = [ s c a l e X ∗ x + s k e w X ∗ y + t r a n X s k e w Y ∗ x + s c a l e Y ∗ y + t r a n Y 1 ] \begin{bmatrix} &x{'}&\\ &y{'}&\\ &1&\\ \end{bmatrix}=\begin{bmatrix} &scaleX &skewX &tranX&\\ &skewY &scaleY &tranY&\\ &persp1 &persp2 &persp3&\\ \end{bmatrix}* \begin{bmatrix} &x&\\ &y&\\ &1&\\ \end{bmatrix}= \begin{bmatrix} &scaleX*x + skewX*y + tranX&\\ &skewY*x + scaleY*y + tranY&\\ &1&\\ \end{bmatrix} ⎣⎡x′y′1⎦⎤=⎣⎡scaleXskewYpersp1skewXscaleYpersp2tranXtranYpersp3⎦⎤∗⎣⎡xy1⎦⎤=⎣⎡scaleX∗x+skewX∗y+tranXskewY∗x+scaleY∗y+tranY1⎦⎤
Matrix实现缩放效果
x方向和y方向,分别缩放k1和k2倍 [ x ′ y ′ 1 ] = [ k 1 0 0 0 k 2 0 0 0 1 ] ∗ [ x y 1 ] = [ k 1 ∗ x k 2 ∗ y 1 ] \begin{bmatrix} &x{'}&\\ &y{'}&\\ &1&\\ \end{bmatrix}=\begin{bmatrix} &k1 &0 &0&\\ &0 &k2 &0&\\ &0 &0 &1&\\ \end{bmatrix}* \begin{bmatrix} &x&\\ &y&\\ &1&\\ \end{bmatrix}= \begin{bmatrix} &k1*x&\\ &k2*y&\\ &1&\\ \end{bmatrix} ⎣⎡x′y′1⎦⎤=⎣⎡k1000k20001⎦⎤∗⎣⎡xy1⎦⎤=⎣⎡k1∗xk2∗y1⎦⎤ Matrix实现平移效果
x方向和y方向,分别平移k1和k2距离
[ x ′ y ′ 1 ] = [ 0 0 k 1 0 0 k 2 0 0 1 ] ∗ [ x y 1 ] = [ x + k 1 y + k 2 1 ] \begin{bmatrix} &x{'}&\\ &y{'}&\\ &1&\\ \end{bmatrix}=\begin{bmatrix} &0 &0 &k1&\\ &0 &0 &k2&\\ &0 &0 &1&\\ \end{bmatrix}* \begin{bmatrix} &x&\\ &y&\\ &1&\\ \end{bmatrix}= \begin{bmatrix} &x+k1&\\ &y+k2&\\ &1&\\ \end{bmatrix} ⎣⎡x′y′1⎦⎤=⎣⎡000000k1k21⎦⎤∗⎣⎡xy1⎦⎤=⎣⎡x+k1y+k21⎦⎤
Matrix实现水平错切效果
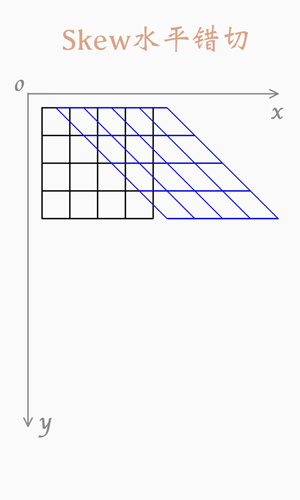 水平错切,即像素的y值不变,x的值随着y的增加,平移距离越来越多,变成斜线
水平错切,即像素的y值不变,x的值随着y的增加,平移距离越来越多,变成斜线
x像素的平移距离,是随着y值的增加,而线性增加的,系数k = Δx / Δy
[ x ′ y ′ 1 ] = [ 1 k 0 0 1 0 0 0 1 ] ∗ [ x y 1 ] = [ x + k ∗ y y 1 ] \begin{bmatrix} &x{'}&\\ &y{'}&\\ &1&\\ \end{bmatrix}=\begin{bmatrix} &1 &k &0&\\ &0 &1 &0&\\ &0 &0 &1&\\ \end{bmatrix}* \begin{bmatrix} &x&\\ &y&\\ &1&\\ \end{bmatrix}= \begin{bmatrix} &x+k*y&\\ &y&\\ &1&\\ \end{bmatrix} ⎣⎡x′y′1⎦⎤=⎣⎡100k10001⎦⎤∗⎣⎡xy1⎦⎤=⎣⎡x+k∗yy1⎦⎤
Matrix实现竖直错切效果
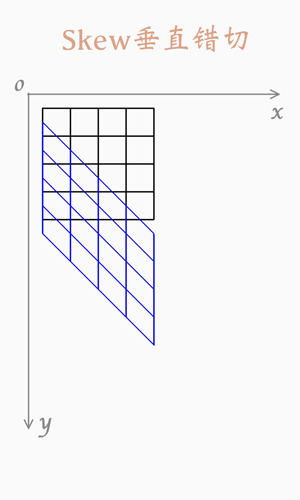 竖直错切,即像素的x值不变,y的值随着x的增加,平移距离越来越多,变成斜线
竖直错切,即像素的x值不变,y的值随着x的增加,平移距离越来越多,变成斜线
y像素的平移距离,是随着x值的增加,而线性增加的,系数k = Δy / Δx
[ x ′ y ′ 1 ] = [ 1 0 0 k 1 0 0 0 1 ] ∗ [ x y 1 ] = [ x k ∗ x + y 1 ] \begin{bmatrix} &x{'}&\\ &y{'}&\\ &1&\\ \end{bmatrix}=\begin{bmatrix} &1 &0 &0&\\ &k &1 &0&\\ &0 &0 &1&\\ \end{bmatrix}* \begin{bmatrix} &x&\\ &y&\\ &1&\\ \end{bmatrix}= \begin{bmatrix} &x&\\ &k*x+y&\\ &1&\\ \end{bmatrix} ⎣⎡x′y′1⎦⎤=⎣⎡1k0010001⎦⎤∗⎣⎡xy1⎦⎤=⎣⎡xk∗x+y1⎦⎤ Matrix实现复合错切效果
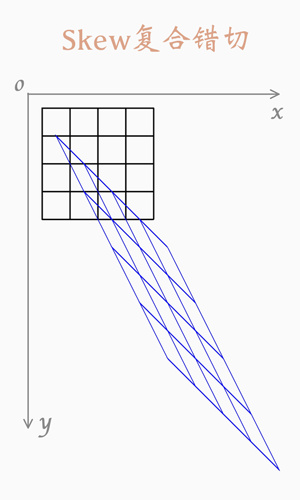 通过左右、上下斜线,我们可以分别得到横切和竖切的系数k1、k2
通过左右、上下斜线,我们可以分别得到横切和竖切的系数k1、k2
k1 = Δx / Δy,k2 = Δy / Δx
[ x ′ y ′ 1 ] = [ 1 k 1 0 k 2 1 0 0 0 1 ] ∗ [ x y 1 ] = [ x + k 1 ∗ y k 2 ∗ x + y 1 ] \begin{bmatrix} &x{'}&\\ &y{'}&\\ &1&\\ \end{bmatrix}=\begin{bmatrix} &1 &k1 &0&\\ &k2 &1 &0&\\ &0 &0 &1&\\ \end{bmatrix}* \begin{bmatrix} &x&\\ &y&\\ &1&\\ \end{bmatrix}= \begin{bmatrix} &x+k1*y&\\ &k2*x+y&\\ &1&\\ \end{bmatrix} ⎣⎡x′y′1⎦⎤=⎣⎡1k20k110001⎦⎤∗⎣⎡xy1⎦⎤=⎣⎡x+k1∗yk2∗x+y1⎦⎤ Matrix实现复合旋转效果
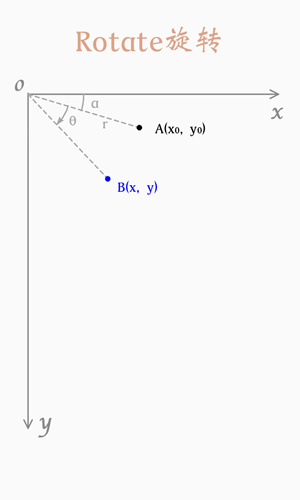 我们先来推导旋转的矩阵公式,由图可知
我们先来推导旋转的矩阵公式,由图可知
x0 = r * cos α y0 = r * sin α x = r * cos(α+θ) = r * cos α * cos θ - r * sin α * sin θ = x0 * cos θ - y0 * sin θ y = r * sin(α+θ) = r * sin α * cos θ + r * cos α * sin θ = y0 * cos θ + x0 * sin θ
这个正好可以用我们的Matrix进行表示
[ x ′ y ′ 1 ] = [ c o s ( θ ) − s i n ( θ ) 0 s i n ( θ ) c o s ( θ ) 0 0 0 1 ] ∗ [ x y 1 ] = [ c o s ( θ ) ∗ x − s i n ( θ ) ∗ y s i n ( θ ) ∗ x + c o s ( θ ) ∗ y 1 ] \begin{bmatrix} &x{'}&\\ &y{'}&\\ &1&\\ \end{bmatrix}=\begin{bmatrix} &cos(θ) &-sin(θ) &0&\\ &sin(θ) &cos(θ) &0&\\ &0 &0 &1&\\ \end{bmatrix}* \begin{bmatrix} &x&\\ &y&\\ &1&\\ \end{bmatrix}= \begin{bmatrix} &cos(θ)*x-sin(θ)*y&\\ &sin(θ)*x+cos(θ)*y&\\ &1&\\ \end{bmatrix} ⎣⎡x′y′1⎦⎤=⎣⎡cos(θ)sin(θ)0−sin(θ)cos(θ)0001⎦⎤∗⎣⎡xy1⎦⎤=⎣⎡cos(θ)∗x−sin(θ)∗ysin(θ)∗x+cos(θ)∗y1⎦⎤
Matrix函数接口
setScale,setSkew,setTranslate,setRotate 清除矩阵之前已有的矩阵变换,将画布/画笔状态设置为新的Matrix
postScale,postSkew,postTranslate,postRotate 在旧的矩阵变换结果基础之上,再进行一次新的变换
preScale,preSkew,preTranslate,preRotate 先执行新的矩阵变换,再执行旧的矩阵变换
假设一个画布的初始状态为S0,然后分别处理了M1,M2两次变换,最终结果为S2,那么 set相当于,S2 = M2 * S0 post相当于,S2 = M2 * (M1 * S0) = (M2 * M1) * S0 pre相当于,S2 = M1 * (M2 * S0) = (M1 * M2) * S0 set和post在实际应用中,是最常用的
reset 重置到初始状态
setSinCos 通过sin,cos的值来设置旋转矩阵,setRotate的另一种方式
setValues 通过设置矩阵元素的值,来设置新的矩阵
setConcat 将连续的两次矩阵变换连接起来,作为新的矩阵,即M = M2 * M1
setRectToRect 自动计算,将一个矩形区域,转变为另一个矩形区域,所需的变换矩阵
setPolyToPoly 自动计算,将一个多边形区域,转变为另一个多边形区域,所需的变换矩阵
invert 计算当前矩阵的逆变换矩阵 比如当前矩阵向右平移了50个像素,则新的矩阵应当是-50个像素

