点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

在2020年中,目标检测领域出现了许多优秀的工作,今天我们来聊一聊在当前热门的五大目标检测开源方案。
1、五大改进,二十多项技巧实验,堪称最强目标检测万花筒:YOLOv4&YOLOv5论文:YOLOv4: Optimal Speed and Accuracy of Object Detection
COCO AP:55.4
论文地址:https://arxiv.org/pdf/2004.10934.pdf
代码地址:https://github.com/AlexeyAB/darknet
YOLOv5:https://github.com/ultralytics/yolov5
(非官方)源码地址:
(1) Pytorch版:https://github.com/WongKinYiu/PyTorch_YOLOv4
(2) tensorflow版:https://github.com/ultralytics/yolov5
YOLOv4试验对比了大量的近几年来最新的深度学习技巧,例如 Swish、Mish激活函数,CutOut和CutMix数据增强方法,DropPath和DropBlock正则化方法,也提出了自己的创新,例如 Mosaic (马赛克) 和 自对抗训练数据增强方法,提出了修改版本的 SAM 和 PAN,跨Batch的批归一化(BN),共五大改进。所以说该文章工作非常扎实,也极具创新。
YOLOv5的工作与YOLOv4十分相近,YOLOv4的网络结构图:

论文:End-to-End Object Detection with Transformers
论文地址:https://arxiv.org/abs/2006.02334
代码地址:https://github.com/facebookresearch/detr
DETR将检测视为集合预测问题,简化了目标检测的整体流程。它没有现在主流的目标检测器中的anchor、label assign、nms等操作,做到了真正的end-to-end。它主要采用了Transformer的编解码结构,它在序列预测任务上大获成功。Transformer中的自注意力机制显示地界定了序列中元素间的相互作用,因此可以用于约束集合的预测结果。
DETR的检测思路是首先使用CNN提取图像特征,然后用transformer模型来检测物体输出set of box predictions ,训练过程采用二分图匹配损失函数。

论文地址:https://arxiv.org/abs/2005.12872
代码地址:https://github.com/google/automl
COCO AP: 51.0
(非官方)源码地址:
(1) Pytorch版:https://github.com/toandaominh1997/EfficientDet.Pytorch
(2) Keras&&TensorFlow版:https://github.com/xuannianz/EfficientDet
EfficientDet一大创新点是改进了FPN中的多尺度特征融合方式,提出了加权双向特征金字塔网络BiFPN。BiFPN 引入了一种自顶向下的路径,融合P3~P7的多尺度特征, 并且EfficientDet认为FPN中各尺度的特征重要性是不同的,故在BiFPN特征融合的连接中需要加权,而权值是在训练中学习得到的。EfficientDet引入了 EfficientNet 中模型缩放的思想,考虑Input size、backbone Network、BiFPN侧向级联层数、Box/class 层深度作为搜索空间,通过统一的系数缩放(具体方法见原论文),得到了8个不同计算量和参数量的模型。
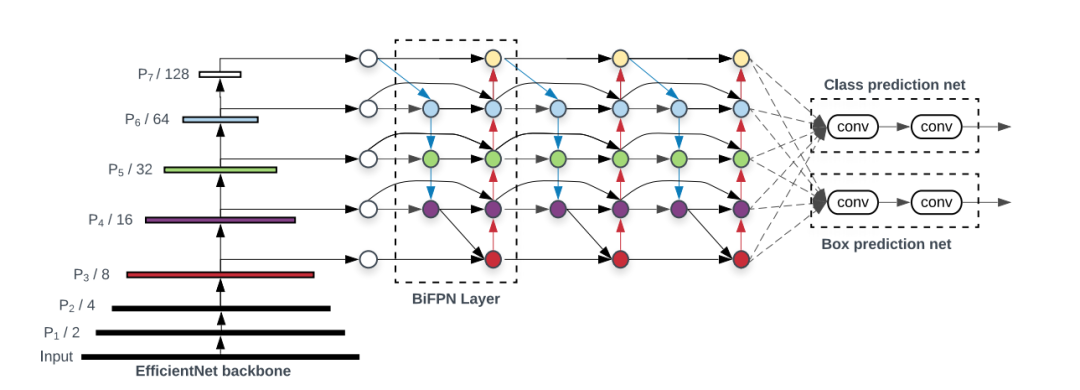
参考阅读:EfficientDet 算法解读
https://zhuanlan.zhihu.com/p/93241232
4、CenterNet2以56.4mAP超越当前所有检测模型论文:Probabilistic two-stage detection
论文地址:https://arxiv.org/abs/2103.07461
代码地址:https://github.com/xingyizhou/CenterNet2
COCO AP: 56.4
CenterNet2在目前最先进的One-Stage检测器的基础上建立了一个概率Two-Stage检测器。对于每一阶段的检测,CenterNet2模型都会提取区域级特征并进行分类。在第2阶段使用更快的R-CNN或级联分类器。这两个阶段一起训练,以最大限度地提高预测的概率准确度。在推理中,CenterNet2使用这个最终的对数似然作为检测得分。
结构说明:

参考阅读:Centernet 算法解读
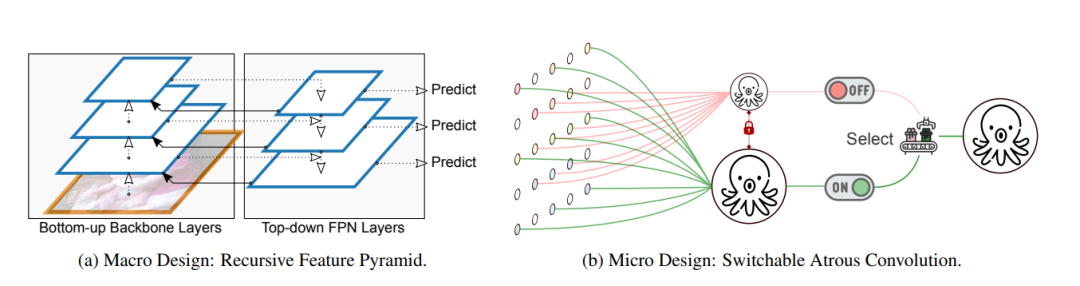
5、特征金字塔与空洞卷积完美结合的目标检测:DetectoRS论文:DetectoRS: Detecting Objects with Recursive Feature Pyramid and Switchable Atrous Convolution
论文地址:https://arxiv.org/abs/2005.12872
代码地址:https://github.com/joe-siyuan-qiao/DetectoRS
COCO AP: 54.7 AP
DetectoRS是谷歌团队提出的目标检测模型,论文中探讨了目标检测中looking and thinking twice的机制,在宏观上提出了递归特征金字塔RFN(Recursive Feature Pyramid),就是把FPN的输出先连接到bottom up那儿进行再次输入,然后再输出时候与原FPN的输出再进行结合一起输出。在微观上提出了可切换空洞卷积SAC(Switchable Atrous Convolution)。在COCO test-dev中取得了SOTA的结果,目标检测box mAP达到54.7,实例分割mask mAP达到47.1,全景分割PQ达到49.6。
参考阅读:DetectoRS算法解读
本文仅做学术分享,如有侵权,请联系删文。
下载1
在「3D视觉工坊」公众号后台回复:3D视觉,即可下载 3D视觉相关资料干货,涉及相机标定、三维重建、立体视觉、SLAM、深度学习、点云后处理、多视图几何等方向。
下载2
在「3D视觉工坊」公众号后台回复:3D视觉github资源汇总,即可下载包括结构光、标定源码、缺陷检测源码、深度估计与深度补全源码、点云处理相关源码、立体匹配源码、单目、双目3D检测、基于点云的3D检测、6D姿态估计源码汇总等。
下载3
在「3D视觉工坊」公众号后台回复:相机标定,即可下载独家相机标定学习课件与视频网址;后台回复:立体匹配,即可下载独家立体匹配学习课件与视频网址。
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、orb-slam3等视频课程)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近2000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、可答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~