Range-Focused Fusion of Camera-IMU-UWB for Accurate and Drift-Reduced Localization
作者:Thien Hoang Nguyen; Thien-Minh Nguyen; Lihua Xie
论文地址:https://ieeexplore.ieee.org/abstract/document/9350155
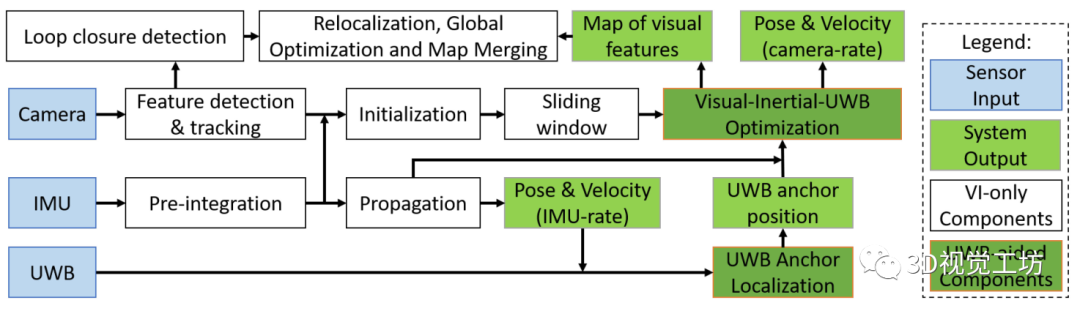
使用了单目camera、imu、UWB来构建一种紧耦合坐标系,其中UWB是一种用于近距离定位的设备,有发送端、接收端构成,测量结果可以直接得到对应的距离和方位,类似于GPS的作用。
摘要: 在这项工作中,我们提出了单目camera、6-DoF IMU 和单个未知UWB锚点的紧耦合融合方案,以实现准确且减少漂移的定位。具体而言,本文着重于将 UWB 传感器整合到现有的最先进的视觉惯性系统中。以前实现这一目标的工作使用单个最近的 UWB 测距数据来更新滑动窗口中的机器人位置(“以位置为中心”),并且已经证明了令人鼓舞的结果。然而,这些方法忽略了 1) UWB 和相机传感器之间的时间偏移,以及 2) 两个连续关键帧之间的所有其他距离。我们的方法通过利用从视觉惯性里程计方案中随时可用的传播信息,将视角转移到 UWB 测量(“关注距离”)。这允许以更有效的方式使用 UWB 数据&#x


