
地图定位算法是自动驾驶模块的核心,而激光SLAM则是地图定位算法的关键技术,其重要性不言而喻,在许多AI产品中应用非常多(包括但不限于自动驾驶、移动机器人、扫地机等)。相比于传统的视觉传感器,激光传感器具备精度高,不易受环境干扰的特质,其衍生的地图定位算法更容易实践落地。且随着激光传感器的降价,新型激光雷达的研发,未来具备自动驾驶功能的车辆几乎都会选择激光雷达方案。越来越多的自动驾驶公司将激光雷达作为自动驾驶感知模块的传感器,与此同时带来的则是重金招聘相关算法工程人才。
如何学习
由于激光SLAM的入门门槛较高,对学习者的数学、编程能力要求比较严格,而且几乎没有系统的学习资料,自学难度较大,支离片解的开源代码学习无法有效地对整个框架产生较深的理解。从数据准备,到框架搭建,很多同学在一系列踩坑后,不得不放弃继续学习,这也导致了后面高薪机会的丢失。为此,3D视觉工坊推出了面向工业级实战类的激光SLAM学习课程《深入剖析激光SLAM的关键算法与实现》,主讲老师为自动驾驶独角兽公司高精地图算法工程师,有丰富的激光SLAM算法理论和工程实践经验。一线算法工程人员带你从算法理论推导到完整的项目实践,保姆级教学,对标企业级岗位要求,更有数据和代码的开源,让学员能够真正搭起来属于自己的一套项目。
▲微信扫码享受8.5折优惠!
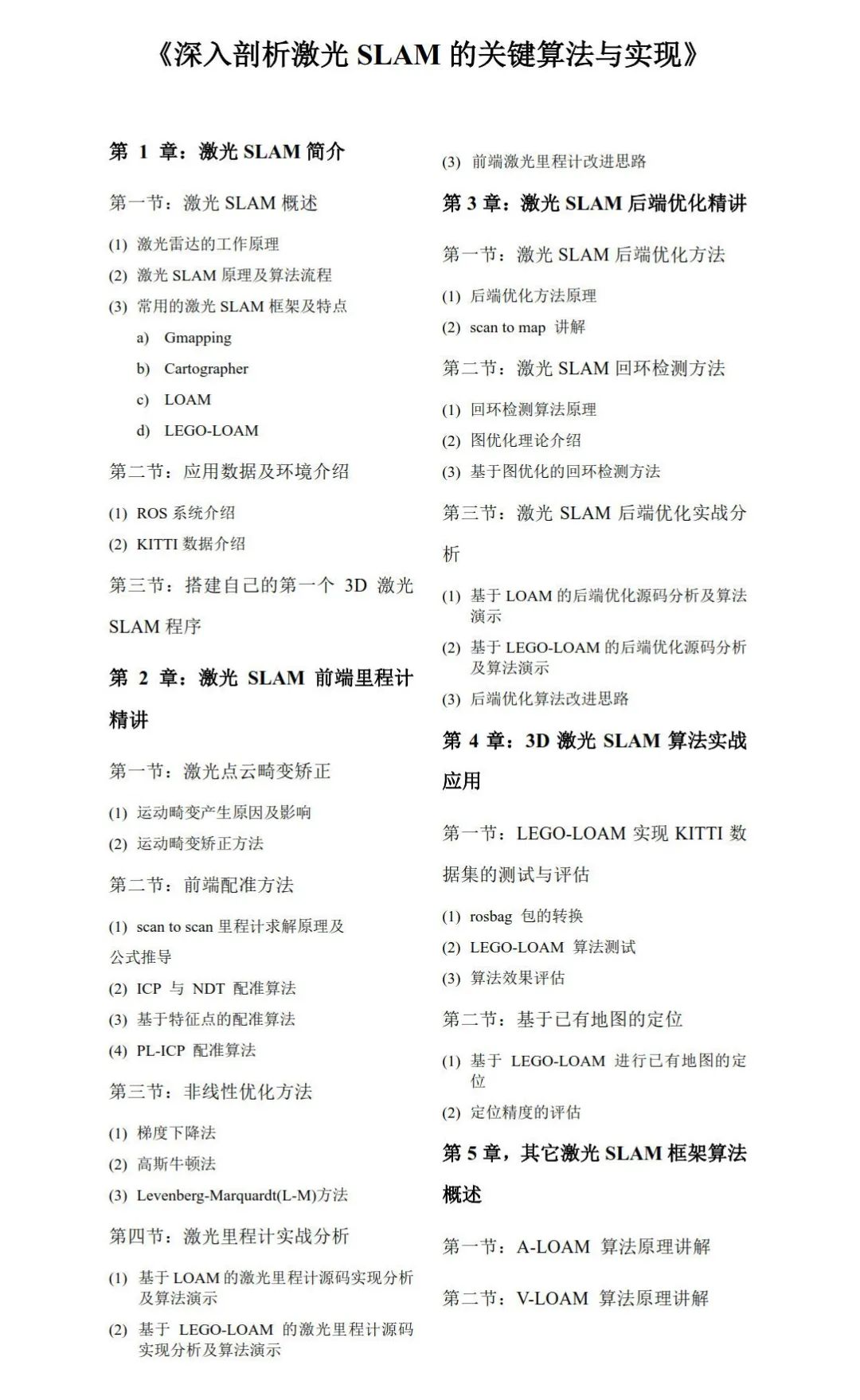
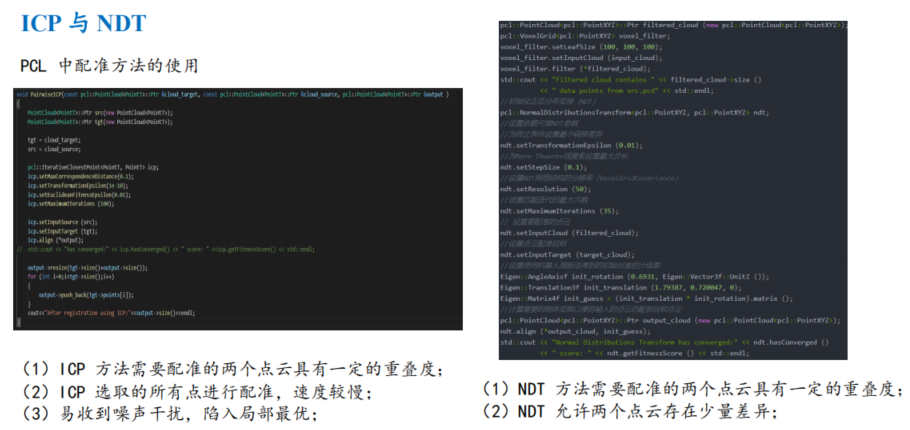
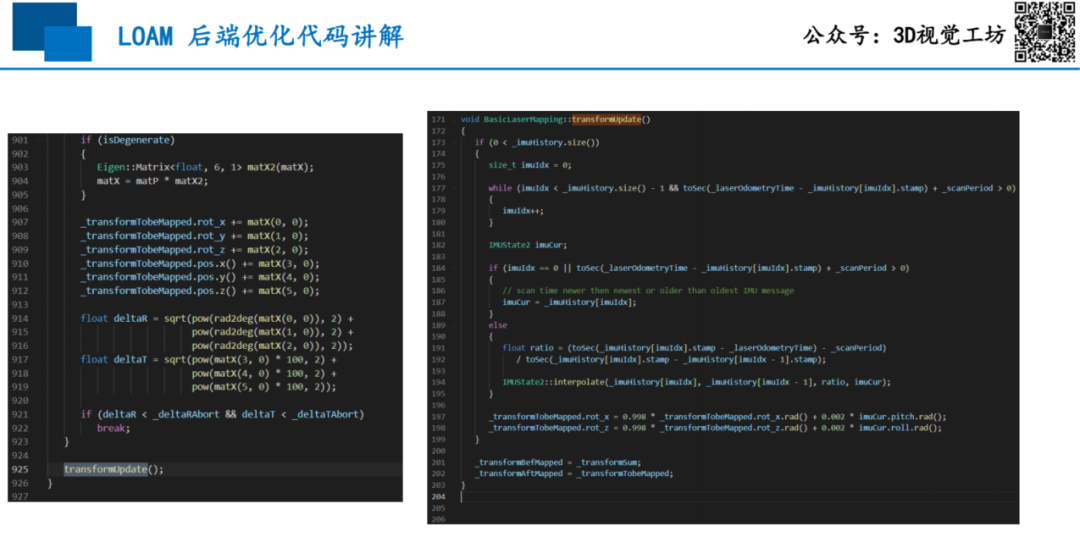
本课程结合理论和实践两大部分:理论部分将全面介绍激光SLAM的整体框架与其前端实现和后端优化的算法原理及公式推导;实践部分将以两个经典的3D激光SLAM方法为例,逐行刨析源代码让学员真正理解相关算法的实现。
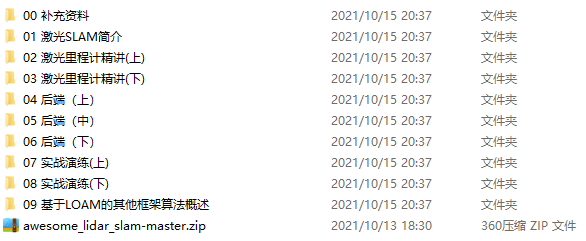
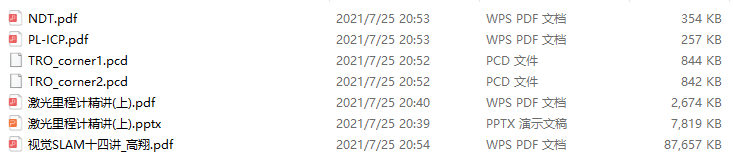
课程现已全部开放,五大章节,14小节,视频+PPT+源码全部开放!
课程大纲
课件与视频、源码
课程亮点
-
国内首个面向3D激光SLAM的系列教程;
-
深入浅出,循序渐进,从理论到实战逐个攻破;
-
理论结合实践,课程结束后布置练习项目,答疑群内,讲师面对面和学员一起交流遇到的难题;
-
优质的学习圈子,可以和来自上海交大、南京大学、华中科技大学、西北工业大学等高校学子一起讨论学习,你踩过的坑他们大概率踩过;
-
真正能面向工业落地的内容分享;
学后收获
-
通过课程的学习,可以对激光SLAM各个模块的算法理论、整体框架以及实际应用有深入了解;
-
对于经典的3D激光SLAM方法:LOAM 和 LEGO-LOAM 有源码角度的理解,能够对前端和后端模块进行优化;
-
可以将自己所学的理论实践应用到科研和工作中,构建出自己的一套激光SLAM工程;
▲微信扫码享受8.5折优惠!
 群号:910070197
▲课程咨询QQ群,了解更多
群号:910070197
▲课程咨询QQ群,了解更多

▲长按加客服微信,咨询更多

