
PnP(Perspective-n-Point)问题的几何结构如图1所示,给定3D点的坐标、对应2D点坐标以及内参矩阵,求解相机的位姿。
数学语言描述如下:
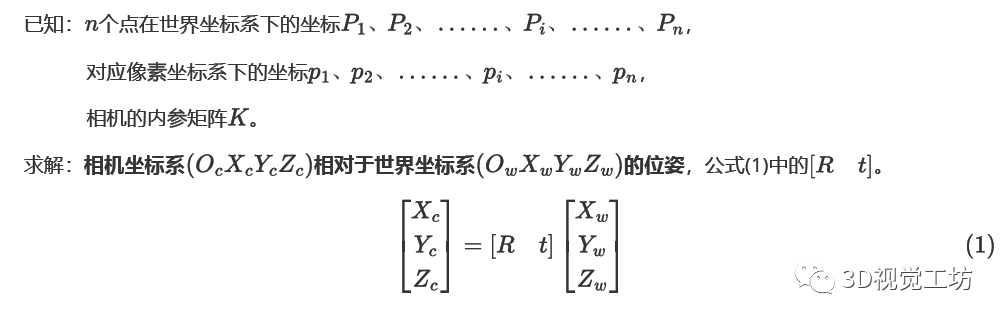
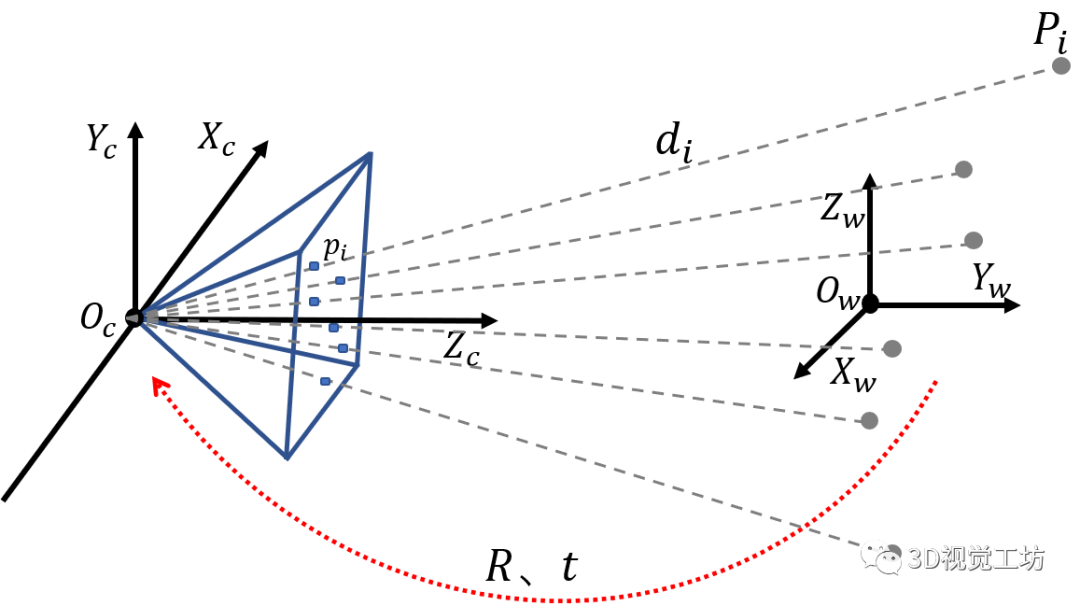
图1.PnP几何结构
1.直接线性变换法(Direct Linear Transform,DLT)假设:摄像机已经校准过了。
已知:

求解相机的外参:R、t
透视投影模型为:
PnP(Perspective-n-Point)问题的几何结构如图1所示,给定3D点的坐标、对应2D点坐标以及内参矩阵,求解相机的位姿。
数学语言描述如下:
图1.PnP几何结构
1.直接线性变换法(Direct Linear Transform,DLT)假设:摄像机已经校准过了。
已知:
求解相机的外参:R、t
透视投影模型为:


微信扫码登录