
在自动驾驶中,如何获取车辆行人等目标的深度信息,是当前很多研究中较为重要的技术点,如3D重建,障碍物检测,SLAM等等。传统上,获取高精度目标深度信息的方法,通常是利用激光雷达或结构光在物体表面的反射获取深度点云,但因其价格昂贵和同步的困难,在自动驾驶领域大规模应用和部署还有一定的距离。
随着特斯拉纯视觉方案的成功以及Tesla AI日惊艳的效果,相机因为其价格低廉、获取信息内容丰富,体积小巧等优点,成为自动驾驶领域较为热门的传感器技术之一。相应地,单目视觉深度估计也受到了研究的热捧,受到了更多的关注。




自动驾驶持续受到资本青睐。2021年以来,陆续收到多家自动驾驶公司获得4亿美元以上的投资的好消息,如独角兽公司Momenta,专注重卡领域的图森科技、智加科技等。目前,重卡无人驾驶汽车图森科技已经成功上市,智加科技也传来即将上市的消息,可见自动驾驶这条赛道是非常具有潜力的。
相关企业对深度估计相关岗位的需求也日益增加,华为、百度、图森、滴滴、Momenta、小鹏、蔚来等公司更是开出高薪聘请相关人才,助力相关产品的落地研发,下面几个截图是某招聘网站上对深度估计相关岗位的要求及待遇:



随着AI技术的发展,深度学习的入门门槛越来越低,但关于单目深度估计的课程还是相对较少,尤其是深度估计工程化方向的课程更少,令许多对该领域感兴趣的同学无从下手。因此,我们借助工坊这个平台,推出《单目深度估计方法:理论与实战》,希望能够凭借自己的一些工程经验帮助大家快速进入该领域。
《单目深度估计方法:理论与实战》课程主要分为两大部分:理论篇和实战篇,由两位知名自动驾驶公司的高级算法工程师教授。由于有监督方法的深度真值获取困难,且无监督方法的效果与有监督方法几乎相当,我们将课程的重心放在了无监督方法上。
其中,理论篇主要包括:深度估计相关的损失函数、评价指标等基础理论,传统深度估计方法、无监督深度估计方法等理论知识。实战部分包括:传统深度估计方法和深度学习方法,偏向于无监督深度估计以及相关应用等等。
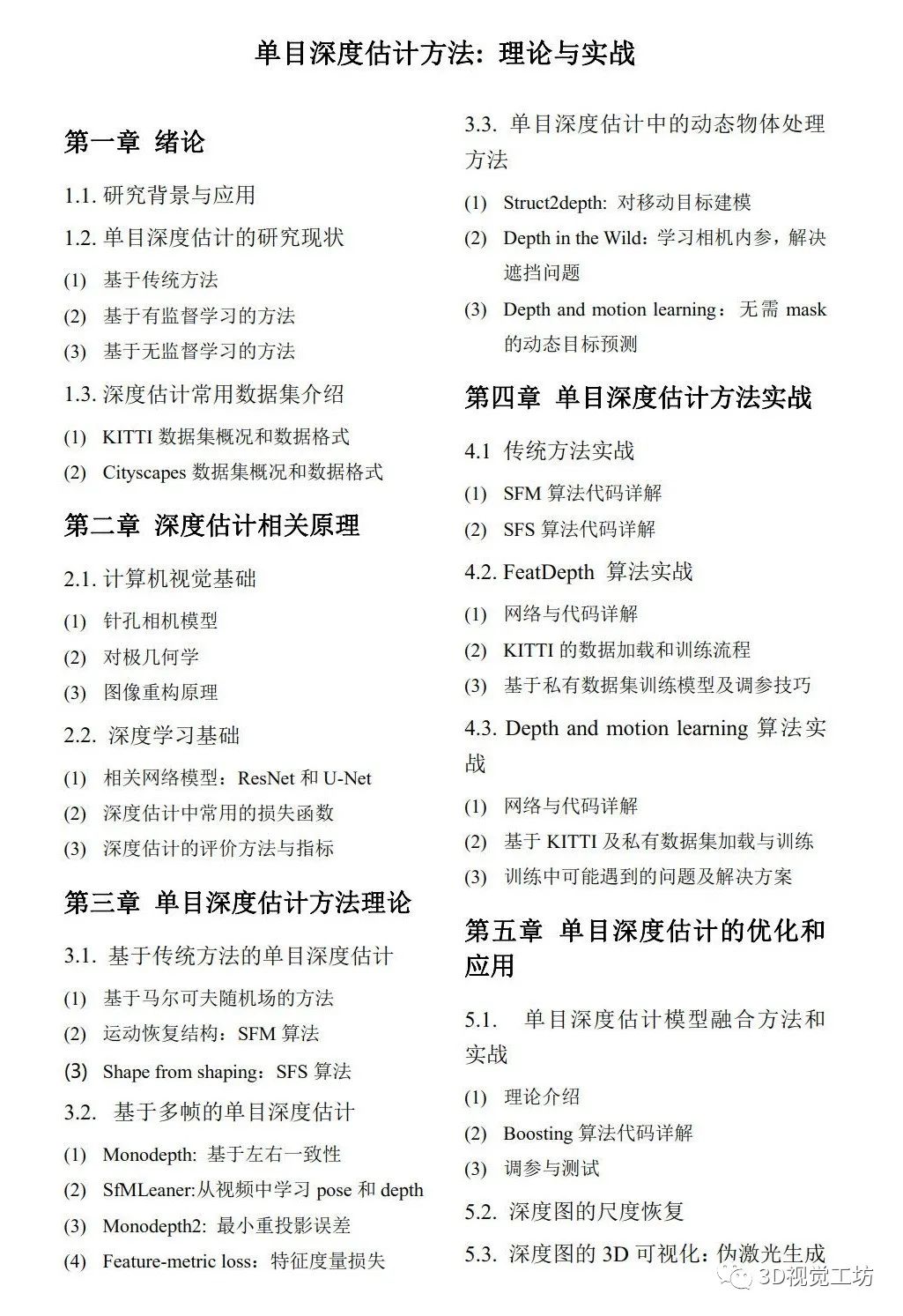
课程大纲
▲微信扫码可查看、购买、学习课程
课程的第一章针对单目深度估计的背景和研究现状展开详细的叙述,随后是与深度估计相关的计算机视觉基础和深度学习基础。
虽然本课程内容主要是单目深度估计,但你同样可以在这里学习到双目深度估计的相关理论:对极几何学。本课程中某些基于单目的方法同时也可以适配双目数据集,比如Monodepth2,FeatDepth, ......
在第三章中,我们会为你详细解读最近几年state-of-art无监督单目深度估计论文的原理,分析每篇论文实际解决的问题,并评价它们的优缺点。
你是否遇到过在公开数据集上训练的效果还不错,但转移到自己数据集上训练就翻车?你是否需要将训练好的模型泛化到不同的数据集上?
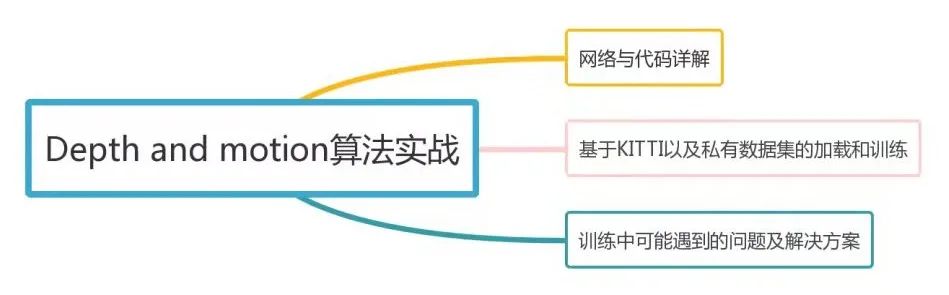
如果是,那么第四章的实战部分就是为你准备的!在实战部分,我们不仅会手把手地教你如何在自己数据集上训练模型,而且会传授大量调参技巧和改进优化经验,让你少走弯路,高效掌握深度估计算法的应用。
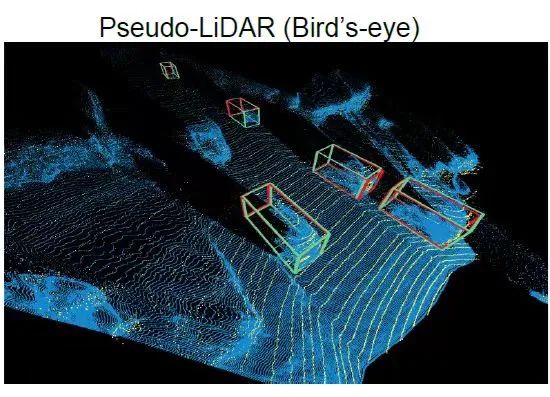
在第五章里,针对模型预测的深度图,我们会为你介绍Boosting的优化方法,提高深度图的细节信息,最后我们会介绍相对深度的尺度恢复和伪激光的可视化。

1. 深入浅出,循序渐进,为你从理论到实战逐个攻破;
2. 讲师多年的工程经验倾情奉献,数据、源码开源帮助你更好地理解每处细节;
3. 理论结合实践,课时结束后布置练习项目,答疑群内,讲师和你在线交流遇到的难题;
4. 优质的学习圈子,你可以和来自清华大学、慕尼黑工业大学,上海交通大学、南京大学、华中科技大学、西北工业大学等高校学子一起讨论学习,你踩过的坑他们大概率也踩过;
5. 真正能面向工业落地的内容分享;
学后收获1. 对深度估计相关理论有较深的理解
2. 能够掌握传统方法以及state-of-art无监督深度估计方法的核心理论
3. 能够在自有数据集上实现深度估计模型的训练和调参
4. 针对深度学习实战中遇到的各种问题,掌握分析原因、解决问题的技能
5. 能够真正对接企业对视觉算法工程师在深度估计方向的技术栈要求
开课时间2021年11月20号开课,课程学习时长2个月,每周更新一次(具体见课程群内通知),课程设置答疑群,讲师将会在群里布置作业并和学员交流相关技术问题。
课程要求及面向对象1. 主要面向自动驾驶领域、SLAM领域相关的在读本科生、硕士、博士,以及正在工作岗位上的一线工程算法人员,也欢迎想要转入该领域的其它方向的同学;
2. 需要有一定的计算机视觉相关基础知识,对camera和Lidar等硬件和模型有一定了解;
3. 对线性代数、矩阵论、概率论有一定的了解;
4. 熟悉Python编程,对深度学习框架Pytorch和Tensorflow有一定的基础
课程购买与咨询
▲微信扫码可查看、购买、学习课程
 群号:910070197
▲课程咨询QQ群,了解更多
群号:910070197
▲课程咨询QQ群,了解更多

▲长按加客服微信,咨询更多

