
点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

作者丨 ChaucerG
编辑丨集智书童

在本文中,作者将现有的基于IoU Loss推广到一个新的Power IoU系列 Loss,该系列具有一个Power IoU项和一个附加的Power正则项,具有单个Power参数α。称这种新的损失系列为α-IoU Loss。
在多目标检测基准和模型上的实验表明,α-IoU损失:
-
可以显著地超过现有的基于IoU的损失;
-
通过调节α,使检测器在实现不同水平的bbox回归精度方面具有更大的灵活性;
-
对小数据集和噪声的鲁棒性更强。
Bounding box 回归通过预测目标的bbox来定位图像/视频中的目标,这是目标检测、定位和跟踪的基础。例如,最高级的目标检测器通常由一个bbox回归分支和一个分类分支组成,其中bbox回归分支生成用于定位对象进行分类的bbox。在这项工作中,作者探索了更有效的损失函数。
早期的目标检测工作使用损失进行bbox回归,而近期的工作直接采用定位性能度量,即Intersection over Union (IoU)作为定位损失。与损失相比,IoU损失对bbox scales是不变的,从而有助于训练更好的检测器。然而,当预测框与Ground truth不重叠时,IoU损失会出现梯度消失问题,导致收敛速度减慢,导致检测器不准确。这激发了几种改进的基于IoU的损失设计,包括Generalized IoU (GIoU)、Distance IoU (DIoU)和Complete IoU (CIoU)。GIoU在IoU损失中引入惩罚项以缓解梯度消失问题,而DIoU和CIoU在惩罚项中考虑了预测框与Ground truth 之间的中心点距离和宽高比。
在本文中,作者通过在现有的IoU Loss中引入power 变换,提出了一个新的IoU损失函数。
首先将Box-Cox变换应用于IoU损失,并将其推广为power IoU loss:αααα,记为α。这里进一步简化α为αα,并将其推广到更一般的形式通过加上额外的power正则化项。这使本文所提损失函数能够概括现有的基于IoU的损失,包括GIoU、DIoU和CIoU,到一个新的power IoU损失函数以获得更准确的边界框回归和目标检测。
实验结果表明,相对于, α(α>1)增加了high IoU目标的损失和梯度,进而提高了bbox回归精度。
当时,它降低了High IoU目标的权重,实验可以看出这会影响BBox的回归精度。power参数α可作为调节α-IoU损失的超参数以满足不同水平的bbox回归精度,其中α >1通过更多地关注High IoU目标来获得高的回归精度(即High IoU阈值)。
从经验上表明,α对不同的模型或数据集并不过度敏感,在大多数情况下,α=3表现一贯良好。α-IoU损失家族可以很容易地用于改进检测器的效果,在干净或嘈杂的环境下,不会引入额外的参数,也不增加训练/推理时间。
本文贡献-
提出了一种新的power IoU损失函数,称为α-IoU,用于精确的bbox回归和目标检测。α-IoU是基于IoU的现有损失的统一幂化;
-
分析了α-IoU的一系列性质,包括顺序保留和损失/梯度重加权,表明适当选择α(即α > 1)有助于提高High IoU目标的损失和梯度自适应加权的bbox回归精度;
-
经验表明,在多个目标检测数据集和模型上,α-IoU损失优于现有的基于IoU的损失,并为小数据集和噪声Box提供更强的鲁棒性。
目前主流的检测模型有2种:
-
基于Anchor的检测模型
-
Anchor-Free检测模型
基于Anchor的检测器可进一步分为:
-
Two-Stage
-
One-Stage模型
Two-Stage基于Anchor的检测器(例如,R-CNN系列,HTC和TSD在目标检测任务中首次提出了区域建议网络),该任务由区域建议网络和分类器组成。rpn生成大量的前景和背景区域建议,然后使用网络对建议中的目标进行分类。
针对实时目标检测,开发了基于Anchor的One-Stage检测器(如YOLO系列、RetinaNet、SSD),可以同时预测BBox和类别,不再需要rpn。在训练基于Anchor的检测器之前,应该定义具有优先尺度和高宽比的Anchor Box。已经提出了一些技术来降低这些模型对人工选择Anchor Box的敏感性,例如基于注意力的融合网络和聚类算法。这些技术从每个滑动窗口或网格单元的训练集中学习之前的Anchor。
2、Anchor-Free Model最近,诸如CornerNet、CenterNet-1、ExtremeNet和Centrpetal-Net等Anchor-Free检测器也被提出来消除Anchor先验。
这些模型首先预测关键点(角、质心或极端点)的位置,然后如果它们在几何上对齐,就将它们分组到相同的框中。还有其他一些模型可以生成像素级的结果。例如,CenterNet-2估计目标的像素级类别以及它们的大小和偏移量。
FCOS使用多头CNN生成像素级分类、中心度和bbox (top, down, left, right)结果,然后是自适应训练样本选择(Adaptive Training Sample Selection, ATSS),作为对自动选择阳性和阴性样本的改进。
此外,还开发了用于不产生Anchor Point或非最大抑制(NMS)的目标检测的Transformer(如DETR系列),其性能与上述基于CNN的检测器相当。
在这项工作中,作者提出了一种新的Generalized IoU损失来提高这些检测器的性能,而不需要任何结构上的修改,这项研究与上述研究也是正交的。
2.2 BBox回归损失基于Anchor的检测器会回归Grounb Truth BBox和它们最近的Anchor之间的偏移量,而Anchor-Free的检测器会预测目标的关键点,一些框架还会生成BBox的大小。然后将预测的偏移量或关键点(w/或w/o大小)映射回像素空间以生成Box。
定位损失通常将生成的BBox与其Ground Truth进行比较。早期的研究采用n范数损失进行BBox的回归,研究发现它对变化的BBox尺度很敏感。最近的研究用IoU损失及其变体,如BIoU、GIoU、DIoU和CIoU来取代它们,因为IoU是定位的度量,而且它是尺度的度量。
-
Bounded IoU (BIoU) 损失基于一组IoU上界使感兴趣区域(RoI)与Ground Truth之间的IoU重叠最大化;
-
GIoU是为了解决非重叠样本上的梯度消失问题而提出的,非重叠样本是指具有非重叠预测Box(IoU为零)的样本;
-
DIoU和CIoU损失进一步考虑了IoU中的重叠面积、中心点距离和纵横比以及正则化项。这些正则化项有助于提高收敛速度和最终检测性能;
-
还有一些损失函数是为了更关注High IoU目标而设计的。例如,Rectified IoU (RIoU)损失和Focal and Efficient IoU(Focal- eiou)损失。这些损失函数增加了那些在高回归精度样本的梯度。然而,与其他基于IoU的损失相比,RIoU和Focal-EIoU既不简洁也不具有泛化性。
在本文中,作者应用一个power变换来推广上述普通IoU损失和基于正则IoU的损失的IoU和正则化项。新的损失家族通过自适应地重新加权高和低IoU目标的损失和梯度,提高了bbox回归精度。
3α-IoU损失 3.1 Preliminaries本部分主要研究目标检测中的bbox回归问题。设是输入空间,是标注空间,dx和dy分别表示输入维度和标注维度。给定数据集的n个训练样本,每个,任务是学习一个函数可以将输入空间映射到标注空间。
在目标检测中,每个,其中为中目标的总数, 表示中第k个目标对应的类别, 为其bbox。
BBox回归性能由预测bbox B和ground truth :
正样本(真阳性和假阳性)是根据IoU阈值从一组预测中确定的,根据该阈值可以计算所有类别对象的平均精度(AP)。例如,AP50度量由IoU高于阈值0.5目标的AP。检测器的最终性能通常通过多个IoU阈值的平均精度(mAP)来评估。
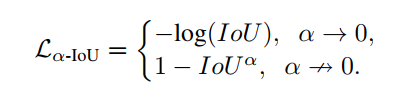
3.2 α-IoU Losses普通IoU损失定义为。这里首先应用Box-Cox变换,将IoU损失归纳为α-IoU损失:

通过对α-IoU中的参数α进行调制,可以推导出现有损失中的大多数IoU terms,如log(IoU)、IoU和。
当时,可以得到αα,
证明如下:

当α = 1时, 。
当α = 2时,。
这里还可以利用多个α值将上述α-IoU公式推广到具有多个IoU项(如RIoU)的损失函数。
对α > 0和的上述α-IoU公式进行简化,在这种情况下,方程(1)中的分母α只是目标中的一个正常数。这给了2种情况的α-IoU损失α > 0和分别为:
在这里,更感兴趣的情况,因为最先进的基于IoU的损失有一个α≥1。然后,通过在公式中引入power惩罚/正则化项,将的上述α-IoU损失扩展到更一般的形式:

式中α,α , α表示根据B和计算的任何penalty term 。
这个简单的扩展可以根据α的值允许对现有的基于IoU的损失进行简单的概括。
作者也通过实例证明了α对并不敏感。因此,保持了IoU项和惩罚项之间的power一致性,并将作为训练检测器的简单选择。
根据上面的α-IoU公式,现在可以使用相同的power参数α来表示IoU和penalty terms归纳出常用的基于IoU的损失包括、、和:
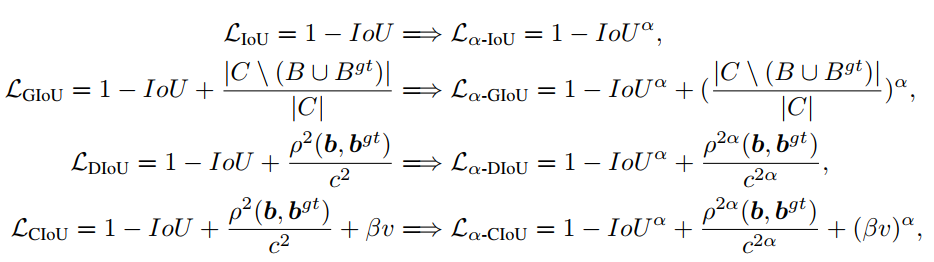
式中,中的C为B和的最小凸形;中的B和表示B和的中心点,ρ(·)为欧几里得距离,c为最小BBox的对角线长度;
而在:

它们提供了在α = 1时回归的bbox回归的power IoU损失。注意,上面的α-IoU泛化可以很容易地扩展到更复杂的具有多个IoU或惩罚项的损失函数。接下来,将分析α取不同值时α- iou损失的性质。
3.3 α-IoU损失的性质在这里,重点分析vanilla α-IoU 公式αα的性质,因为惩罚条件对这些性质的影响是不同的。图1显示了IoU和α(左)之间的关系及其梯度。其中一个关键的观测结果是,IoU损失(即α=1)与IoU呈线性相关,梯度为常数,而α根据目标的IoU值自适应加权。
α的幂变换保留了作为性能度量的关键性质,包括非负性、不可分辨恒等式、对称性和三角形不等式。此外,分析了α的以下重要性质:
1、Order保持性
首先让和分别为2个不同模型和的预测框,和对应相同的Ground truth 和IoU()
最近更新
- 深拷贝和浅拷贝的区别(重点)
- 【Vue】走进Vue框架世界
- 【云服务器】项目部署—搭建网站—vue电商后台管理系统
- 【React介绍】 一文带你深入React
- 【React】React组件实例的三大属性之state,props,refs(你学废了吗)
- 【脚手架VueCLI】从零开始,创建一个VUE项目
- 【React】深入理解React组件生命周期----图文详解(含代码)
- 【React】DOM的Diffing算法是什么?以及DOM中key的作用----经典面试题
- 【React】1_使用React脚手架创建项目步骤--------详解(含项目结构说明)
- 【React】2_如何使用react脚手架写一个简单的页面?


微信扫码登录