
 RP-VIO: Robust Plane-based Visual-Inertial Odometry for Dynamic Environments
RP-VIO: Robust Plane-based Visual-Inertial Odometry for Dynamic Environments
来源:Ram K, Kharyal C, Harithas S S, et al. RP-VIO: Robust Plane-based Visual-Inertial Odometry for Dynamic Environments[J]. IROS 2021
单位:印度海得拉巴机器人研究中心;
代码开源:https://github.com/karnikram/rp-vio
针对问题:
面向动态场景的鲁棒视惯融合里程计
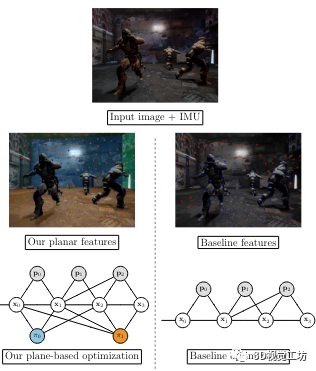
提出方法:
充分利用场景中的平面约束,在初始化、滑窗优化中对自身位姿进行优化
达到效果:
相较于VINS-Mono、VINS-Mask,RP-VIO在论文自建数据集、VIODE、OpenLORIS-Scene、ADVIO数据集上实现了鲁棒且准确的定位效果。
Abstract
VINS系统在实际部署中面临着一个关键的挑战&

