
来源:Monte-Carlo Localization in Underground Parking Lots using Parking Slot Numbers IROS 2021
单位:上海科技大学
针对问题:
地下停车场自主泊车定位
提出方法:
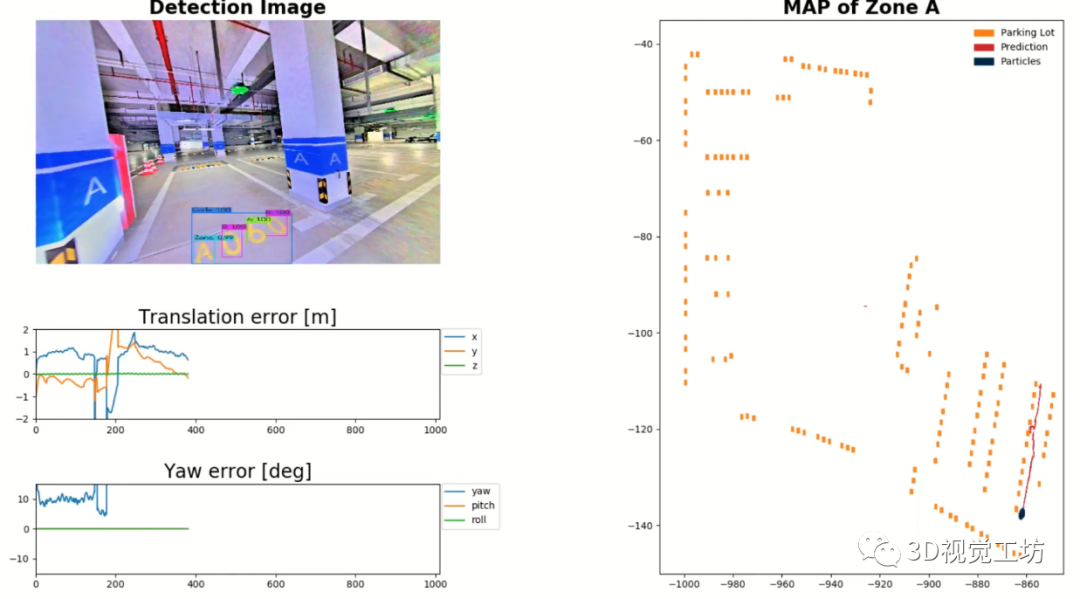
系统针对无GPS信号、场景高度相似的地下停车场场景的全局定位问题,结合OCR获取的语义信息和对路标观测的几何信息构建了一个新的观测模型整合到蒙特卡洛定位框架中,实现基于停车位标识数字的语义地图的纯视觉定位系统。
达到效果:
所提出系统在上海最大的地下停车场之一的多个真实世界序列中得到了验证,实现了平均位置和方向误差分别为0.690米和8.857度的定位精度。
Abstract
地下车库的自主泊车是一个新兴的智能汽车应用场景,社会各界普遍认为可以用低成本的传感器来解决。然而,在缺乏GPS信号和高度的相似性的环境中进行全局视觉定位仍是一个极具挑战的问题。我们提出了一种新颖的地下停车场定位方法,该方法依靠OCR来自动检测停车位号码,然后将检测到的数字与从环境的离线地图中提取的几何信息和语义信息进行数据关联,进而作为新的测量模型加入到蒙特卡洛定位框架中。本文提出的方法在上海最大的地下停车场之一的多个真实世界序列中得到了验证。
Main Contribut

