RF-LIO: 面向高动态场景的紧耦合LiDAR惯导融合里程计
单位:西安交通大学
针对问题:
实际场景中动态因素的引入造成基于静态假设的LIO严重位姿漂移
提出方法:
提出基于自适应的多分辨率Range Image的动态点移除算法,并使用紧耦合的激光雷达惯导里程计,首先去除移动物体,然后将激光雷达扫描与子图相匹配,构建基于优先移除的面向高动态场景的LIO。
达到效果:
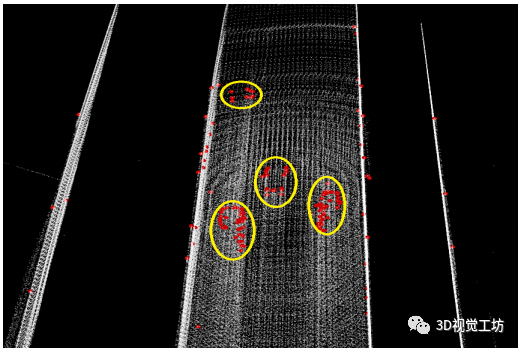
在不同动态程度的实际场景数据集中测试了系统的定位精度,RF-LIO的绝对轨迹精度相较于LOAM和LIO-SAM显著提升。所提出基于Range Image的动态点剔除算法可剔除场景中96%以上的动态点。
Abstract
SLAM被认为是智能车辆和移动机器人的一项基本能力。然而,目前大多数的激光雷达SLAM方法都是基于静态环境的假设。因此,在一个有多个移动物体的动态环境中的定位实际上是不可靠的。本文在LIO-SAM的基础上提出了一个动态SLAM框架RF-LIO,它增加了自适应的多分辨率Range Image,并使用紧耦合的激光雷达惯导里程计,首先去除移动物体,然后将激光雷达扫描与子图相匹配。因此,即使在高动态环境中,它也能


