
编辑丨古月居
目标
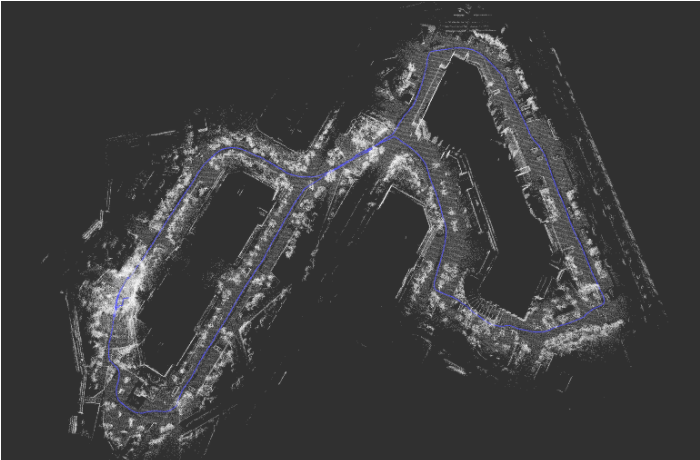
利用ICP进行闭环检测,完成闭环。
预期效果:通过闭环检测完成起止闭环,下图为加入闭环前后。

rosbag数据:
https://pan.baidu.com/s/1o-noUxgVCdFkaIH21zPq0A
提取码: mewi
程序:https://gitee.com/eminbogen/one_liom
问题分析
帧-地图匹配时效性问题
由于上次实验是保存了整个地图,所以在有较好降采样时,匹配时间后期也会达到70ms一帧,这并不十分实时。
闭环问题
实际轨迹是走了类似8字的轨迹,起止点重合。
局部地图构建
构建一个局部地图就是在当前帧位置上找比较近点,具体做法是找位置比较近的帧,我们把每次后端计算的帧的位置保存为一个point(XYZ格式),多帧就可以保存为一个pointcloud,当获得一个新帧时可以根据里程计的结果大体估计当前位置,利用KD树找最近的点,程序中我们找200个临近帧,将他们的plane点构建局部地图。
同时,将帧的序号记录,如果有比当前帧的序号少200以上的历史帧(比如8的中心位置,会遇到历史帧),就记录最近的历史帧(KD树输出按距离从近到远排序),历史帧用在后面闭环检测。
//把所有过去的pose送入KD树pcl::KdTreeFLANNkdtreePose;kdtreePose.setInputCloud(laserCloudMap_Pose);//当前位置PointType pointpose;pointpose.x=t_w_curr.x();pointpose.y=t_w_curr.y();pointpose.z=t_w_curr.z();//KD树求解200个最近的pose,获取第几帧pointSearchInd,以及距当前帧的距离pointSearchSqDisstd::vectorpointSearchInd;std::vectorpointSearchSqDis;kdtreePose.nearestKSearch(pointpose, 200, pointSearchInd, pointSearchSqDis);//history_close_num为临近帧为历史帧(不在当前的前200帧的数量),hisory_close_flag是最近历史帧已有的标志,只有当前帧存在历史帧才会标志为true,不再进行判断//history_close_Ind_temp为暂时保存的最近历史帧为第几帧,在满足历史帧在临近帧中有50个时,赋值给history_close_Indint history_close_num=0;bool hisory_close_flag=false;long history_close_Ind_temp=0;history_close_Ind=0;for(int i=0;i<200;i++){ //对于局部地图需要获取的plane点,要从有着全部plane点的laserCloudMap里取,从map_point_begin取到map_point_end //pointSearchInd[i]是第i近的帧是SLAM过程中的帧数,laserCloudMap_Ind[pointSearchInd[i]-1]是该帧起始的点的位置, //laserCloudMap_Ind[pointSearchInd[i]]是该帧结束的点的位置 long map_point_begin=0; long map_point_end=0; if(pointSearchInd[i]!=0) map_point_begin = laserCloudMap_Ind[pointSearchInd[i]-1]; map_point_end = laserCloudMap_Ind[pointSearchInd[i]]; //从起始点录取到结束点 for(long j=map_point_begin;jpoints.push_back(laserCloudMap->points[j]); } //如果临近帧有历史帧,那么保存最近帧的位置,将最近帧已有标志打true,历史帧数量加1 if(pointSearchInd[i]
关注
打赏
最近更新
- 深拷贝和浅拷贝的区别(重点)
- 【Vue】走进Vue框架世界
- 【云服务器】项目部署—搭建网站—vue电商后台管理系统
- 【React介绍】 一文带你深入React
- 【React】React组件实例的三大属性之state,props,refs(你学废了吗)
- 【脚手架VueCLI】从零开始,创建一个VUE项目
- 【React】深入理解React组件生命周期----图文详解(含代码)
- 【React】DOM的Diffing算法是什么?以及DOM中key的作用----经典面试题
- 【React】1_使用React脚手架创建项目步骤--------详解(含项目结构说明)
- 【React】2_如何使用react脚手架写一个简单的页面?
立即登录/注册


微信扫码登录