
作者 | DefTruth@知乎(已授权)
来源 | https://zhuanlan.zhihu.com/p/455165568
编辑 | 极市平台
导读
前段时间写了篇关于SCRFD(吊打了自己的老大哥RetinaFace)模型转换的文章,还有C++工程部分没有补充,所以这篇文章目的之一就是填坑。本文从SCRFD的官仓中,重新导出具体命名输出的onnx文件,比如score_8,score_16,score_32等,使统一的接口封装效果更优。

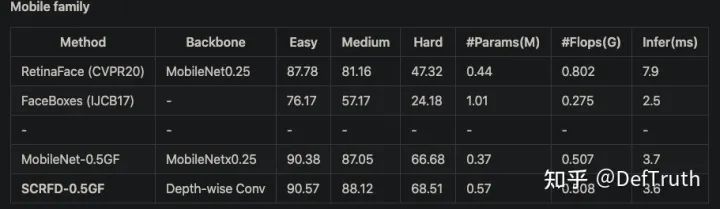
前段时间写了篇关于SCRFD(吊打了自己的老大哥RetinaFace)模型转换的文章,还有C++工程部分没有补充,所以这篇文章目的之一就是填坑。
【DefTruth:野路子:记录一个解决onnx转ncnn时op不支持的trick】— https://zhuanlan.zhihu.com/p/451446147
当时用的是以下仓库的onnx文件来转ncnn、MNN和TNN模型,遇到了一些op转换问题,不得已才用了上篇文章写的奇怪的trick。文章地址:https://github.com/ppogg/onnx-scrfd-flask
但是由于这里的onnx在转换时没有对各个输出指定name,在onnx中,输出的name被随机化成不同的数字,比如224、347、456等等,而且不同的onnx文件,这个数字都是不一样的。这对统一的接口封装就不太友好了。于是还是决定从SCRFD的官仓中,重新导出具体命名输出的onnx文件,比如score_8,score_16,score_32等。
1. SCRFD Docker镜像一开始打算在Mac上安装mmcv和mmdet,但是出现各种编译的奇怪问题,放弃了。转向docker的方式。由于mmcv需要和torch的版本对应,目前支持到torch-1.8.0,因此采用了pytorch的1.8.0镜像作为基础镜像。剩下SCRFD 镜像的搭建过程,类似【小白教程:树莓派3B+onnxruntime+scrfd+flask实现公网人脸检测系统】https://zhuanlan.zhihu.com/p/377561559
我在这里就不再重复了。直接放一个我搭建好的镜像吧,直接pull下来用就可以了,已经包含了SCRFD原始的pth权重,以及我转换后的onnx文件。
【Docker Hub: onnx-scrfd-converter】https://hub.docker.com/repository/docker/qyjdefdocker/onnx-scrfd-converter
docker pull qyjdefdocker/onnx-scrfd-converter:v0.3
编写后台启动容器的脚本, run_scrfd_onnx_docker.sh.
#!/bin/bash
PORT1=6004
PORT2=6006
SERVICE_DIR=/Users/xxx/Desktop/xxx/insightface/detection/scrfd/share # 随便建一个共享文件夹
CONRAINER_DIR=/workspace/insightface/detection/scrfd/share
CONRAINER_NAME=onnx_scrfd_converter_d
docker run -idt -p ${PORT2}:${PORT1} -v ${SERVICE_DIR}:${CONRAINER_DIR} --shm-size=16gb --name ${CONRAINER_NAME} onnx-scrfd-converter:v0.3
然后启动并进入容器
sh ./run_scrfd_onnx_docker.sh docker exec -it onnx_scrfd_converter_d /bin/bash
weights文件夹的是pth权重,onnx文件夹是我转换好的onnx文件。通过与容器共享文件夹的方式,可以将容器内的文件拷贝到本地。
cd /workspace/insightface/detection/scrfd cp onnx/* share/2. SCRFD 工程简介
首先,所有的示例代码放在了https://github.com/DefTruth/scrfd.lite.ai.toolkit
Lite.AI.ToolKit工具箱捏了一些可以参考的C++例子(凑合着看看)https://github.com/DefTruth/lite.ai.toolkit
使用 Lite.AI.ToolKit C++工具箱来跑SCRFD的一些案例 https://github.com/DefTruth/lite.ai.toolkit,包含ONNXRuntime C++、MNN、TNN和NCNN版本。

Star⭐️ 什么的,就随缘吧~
3. SCRFD C++版本源码SCRFD C++ 版本的源码包含ONNXRuntime、MNN、TNN和NCNN四个版本,源码可以在 【lite.ai.toolkit】— https://github.com/DefTruth/lite.ai.toolkit 工具箱中找到。本项目主要介绍如何基于 【lite.ai.toolkit】— https://github.com/DefTruth/lite.ai.toolkit 工具箱,直接使用SCRFD来跑人脸检测。需要说明的是,本项目是基于MacOS下编译的 【liblite.ai.toolkit.v0.1.0.dylib】— https://github.com/DefTruth/yolox.lite.ai.toolkit/blob/main/lite.ai.toolkit/lib 来实现的,对于使用 MacOS 的用户,可以直接下载本项目包含的liblite.ai.toolkit.v0.1.0动态库和其他依赖库进行使用。而非MacOS用户,则需要从【lite.ai.toolkit】— https://github.com/DefTruth/lite.ai.toolkit 中下载源码进行编译。【lite.ai.toolkit】— https://github.com/DefTruth/lite.ai.toolkit
c++工具箱目前包含70+流行的开源模型,就不多介绍了,只是平时顺手捏的,整合了自己学习过程中接触到的一些模型,感兴趣的同学可以去看看。
-
【scrfd.cpp】https://github.com/DefTruth/lite.ai.toolkit/blob/main/lite/ort/cv/scrfd.cpp
-
【scrfd.h】https://github.com/DefTruth/lite.ai.toolkit/blob/main/lite/ort/cv/scrfd.h
-
【mnn_scrfd.cpp】https://github.com/DefTruth/lite.ai.toolkit/blob/main/lite/mnn/cv/mnn_scrfd.cpp
-
【mnn_scrfd.h】https://github.com/DefTruth/lite.ai.toolkit/blob/main/lite/mnn/cv/mnn_scrfd.h
-
【tnn_scrfd.cpp】https://github.com/DefTruth/lite.ai.toolkit/blob/main/lite/tnn/cv/tnn_scrfd.cpp
-
【tnn_scrfd.h】https://github.com/DefTruth/lite.ai.toolkit/blob/main/lite/tnn/cv/tnn_scrfd.h
-
【ncnn_scrfd.cpp】https://github.com/DefTruth/lite.ai.toolkit/blob/main/lite/ncnn/cv/ncnn_scrfd.cpp
-
【ncnn_scrfd.h】https://github.com/DefTruth/lite.ai.toolkit/blob/main/lite/ncnn/cv/ncnn_scrfd.h
ONNXRuntime C++、MNN、TNN和NCNN版本的推理实现均已测试通过,欢迎白嫖~
4. 模型文件 4.1 ONNX模型文件可以从我提供的链接下载 【Baidu Drive】https://pan.baidu.com/s/1elUGcx7CZkkjEoYhTMwTRQ- code: 8gin,也可以从本直接仓库下载。
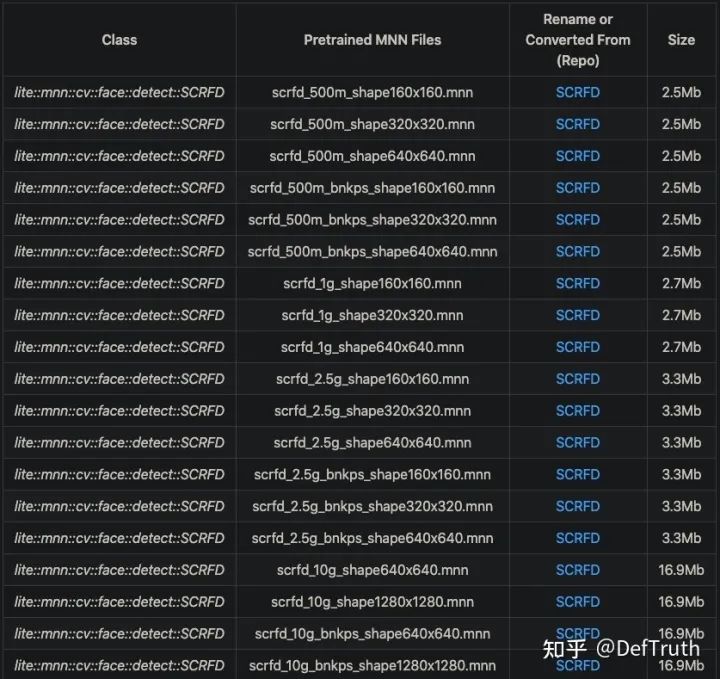
 4.2 MNN模型文件
4.2 MNN模型文件
MNN模型文件下载地址,【Baidu Drive】https://pan.baidu.com/s/1KyO-bCYUv6qPq2M8BH_Okg- code: 9v63,也可以从本直接仓库下载。
 4.3 TNN模型文件
4.3 TNN模型文件
TNN模型文件下载地址,【Baidu Drive】https://pan.baidu.com/s/1lvM2YKyUbEc5HKVtqITpcw- code: 6o6k,也可以从本直接仓库下载。
 4.4 NCNN模型文件
4.4 NCNN模型文件
NCNN模型文件下载地址,【Baidu Drive】https://pan.baidu.com/s/1hlnqyNsFbMseGFWscgVhgQ- code: sc7f,也可以从本直接仓库下载。
 5. 接口文档
5. 接口文档
在【lite.ai.toolkit】https://github.com/DefTruth/lite.ai.toolkit 中,SCRFD的实现类为:
class LITE_EXPORTS lite::cv::face::detect::SCRFD; class LITE_EXPORTS lite::mnn::cv::face::detect::SCRFD; class LITE_EXPORTS lite::tnn::cv::face::detect::SCRFD; class LITE_EXPORTS lite::ncnn::cv::face::detect::SCRFD;
该类型目前包含1公共接口detect用于进行目标检测。
public: /** * @param mat cv::Mat BGR format * @param detected_boxes_kps vector of BoxfWithLandmarks to catch detected boxes and landmarks. * @param score_threshold default 0.25f, only keep the result which >= score_threshold. * @param iou_threshold default 0.45f, iou threshold for NMS. * @param topk default 400, maximum output boxes after NMS. */ void detect(const cv::Mat &mat, std::vector &detected_boxes_kps, float score_threshold = 0.25f, float iou_threshold = 0.45f, unsigned int topk = 400);
detect接口的输入参数说明:
-
mat: cv::Mat类型,BGR格式。
-
detected_boxes_kps: BoxfWithLandmarks向量,包含被检测到的框box(Boxf),box中包含x1,y1,x2,y2,label,score等成员; 以及landmarks(landmarks)人脸关键点(5个),其中包含了points,代表关键点,是一个cv::point2f向量(vector);
-
score_threshold:分类得分(质量得分)阈值,默认0.25,小于该阈值的框将被丢弃。
-
iou_threshold:NMS中的iou阈值,默认0.3。
-
topk:默认400,只保留前k个检测到的结果。
这里测试使用的是scrfd_2.5g_bnkps_shape640x640.onnx版本的模型,你可以尝试使用其他版本的模型。
6.1 ONNXRuntime版本#include "lite/lite.h"
static void test_default()
{
std::string onnx_path = "../hub/onnx/cv/scrfd_2.5g_bnkps_shape640x640.onnx";
std::string test_img_path = "../resources/4.jpg";
std::string save_img_path = "../logs/4.jpg";
auto *scrfd = new lite::cv::face::detect::SCRFD(onnx_path);
std::vector detected_boxes;
cv::Mat img_bgr = cv::imread(test_img_path);
scrfd->detect(img_bgr, detected_boxes, 0.3f);
lite::utils::draw_boxes_with_landmarks_inplace(img_bgr, detected_boxes);
cv::imwrite(save_img_path, img_bgr);
std::cout << "Default Version Done! Detected Face Num: " << detected_boxes.size() << std::endl;
delete scrfd;
}
6.2 MNN版本
#include "lite/lite.h"
static void test_mnn()
{
#ifdef ENABLE_MNN
std::string mnn_path = "../hub/mnn/cv/scrfd_2.5g_bnkps_shape640x640.mnn";
std::string test_img_path = "../resources/12.jpg";
std::string save_img_path = "../logs/12.jpg";
auto *scrfd = new lite::mnn::cv::face::detect::SCRFD(mnn_path);
std::vector detected_boxes;
cv::Mat img_bgr = cv::imread(test_img_path);
scrfd->detect(img_bgr, detected_boxes, 0.3f);
lite::utils::draw_boxes_with_landmarks_inplace(img_bgr, detected_boxes);
cv::imwrite(save_img_path, img_bgr);
std::cout << "MNN Version Done! Detected Face Num: " << detected_boxes.size() << std::endl;
delete scrfd;
#endif
}
6.3 TNN版本
#include "lite/lite.h"
static void test_tnn()
{
#ifdef ENABLE_TNN
std::string proto_path = "../hub/tnn/cv/scrfd_2.5g_bnkps_shape640x640.opt.tnnproto";
std::string model_path = "../hub/tnn/cv/scrfd_2.5g_bnkps_shape640x640.opt.tnnmodel";
std::string test_img_path = "../resources/9.jpg";
std::string save_img_path = "../logs/9.jpg";
auto *scrfd = new lite::tnn::cv::face::detect::SCRFD(proto_path, model_path);
std::vector detected_boxes;
cv::Mat img_bgr = cv::imread(test_img_path);
scrfd->detect(img_bgr, detected_boxes, 0.3f);
lite::utils::draw_boxes_with_landmarks_inplace(img_bgr, detected_boxes);
cv::imwrite(save_img_path, img_bgr);
std::cout << "TNN Version Done! Detected Face Num: " << detected_boxes.size() << std::endl;
delete scrfd;
#endif
}
6.4 NCNN版本
#include "lite/lite.h"
static void test_ncnn()
{
#ifdef ENABLE_NCNN
std::string param_path = "../hub/ncnn/cv/scrfd_2.5g_bnkps_shape640x640.opt.param";
std::string bin_path = "../hub/ncnn/cv/scrfd_2.5g_bnkps_shape640x640.opt.bin";
std::string test_img_path = "../resources/1.jpg";
std::string save_img_path = "../logs/1.jpg";
auto *scrfd = new lite::ncnn::cv::face::detect::SCRFD(param_path, bin_path, 1, 640, 640);
std::vector detected_boxes;
cv::Mat img_bgr = cv::imread(test_img_path);
scrfd->detect(img_bgr, detected_boxes, 0.3f);
lite::utils::draw_boxes_with_landmarks_inplace(img_bgr, detected_boxes);
cv::imwrite(save_img_path, img_bgr);
std::cout << "NCNN Version Done! Detected Face Num: " << detected_boxes.size() << std::endl;
delete scrfd;
#endif
}
-
输出结果为:
 7. 编译运行
7. 编译运行
在MacOS下可以直接编译运行本项目,无需下载其他依赖库。其他系统则需要从【lite.ai.toolkit】https://github.com/DefTruth/lite.ai.toolkit 中下载源码先编译_lite.ai.toolkit.v0.1.0_动态库。
git clone --depth=1 https://github.com/DefTruth/scrfd.lite.ai.toolkit.git cd scrfd.lite.ai.toolkit sh ./build.sh
-
CMakeLists.txt设置
cmake_minimum_required(VERSION 3.17)
project(scrfd.lite.ai.toolkit)
set(CMAKE_CXX_STANDARD 11)
# setting up lite.ai.toolkit
set(LITE_AI_DIR ${CMAKE_SOURCE_DIR}/lite.ai.toolkit)
set(LITE_AI_INCLUDE_DIR ${LITE_AI_DIR}/include)
set(LITE_AI_LIBRARY_DIR ${LITE_AI_DIR}/lib)
include_directories(${LITE_AI_INCLUDE_DIR})
link_directories(${LITE_AI_LIBRARY_DIR})
set(OpenCV_LIBS
opencv_highgui
opencv_core
opencv_imgcodecs
opencv_imgproc
opencv_video
opencv_videoio
)
# add your executable
set(EXECUTABLE_OUTPUT_PATH ${CMAKE_SOURCE_DIR}/examples/build)
add_executable(lite_scrfd examples/test_lite_scrfd.cpp)
target_link_libraries(lite_scrfd
lite.ai.toolkit
onnxruntime
MNN # need, if built lite.ai.toolkit with ENABLE_MNN=ON, default OFF
ncnn # need, if built lite.ai.toolkit with ENABLE_NCNN=ON, default OFF
TNN # need, if built lite.ai.toolkit with ENABLE_TNN=ON, default OFF
${OpenCV_LIBS}) # link lite.ai.toolkit & other libs.
-
building && testing information:
[ 50%] Building CXX object CMakeFiles/lite_scrfd.dir/examples/test_lite_scrfd.cpp.o
[100%] Linking CXX executable lite_scrfd
[100%] Built target lite_scrfd
Testing Start ...
LITEORT_DEBUG LogId: ../hub/onnx/cv/scrfd_2.5g_bnkps_shape640x640.onnx
=============== Input-Dims ==============
input_node_dims: 1
input_node_dims: 3
input_node_dims: 640
input_node_dims: 640
=============== Output-Dims ==============
Output: 0 Name: score_8 Dim: 0 :1
Output: 0 Name: score_8 Dim: 1 :12800
Output: 0 Name: score_8 Dim: 2 :1
Output: 1 Name: score_16 Dim: 0 :1
Output: 1 Name: score_16 Dim: 1 :3200
Output: 1 Name: score_16 Dim: 2 :1
Output: 2 Name: score_32 Dim: 0 :1
Output: 2 Name: score_32 Dim: 1 :800
Output: 2 Name: score_32 Dim: 2 :1
Output: 3 Name: bbox_8 Dim: 0 :1
Output: 3 Name: bbox_8 Dim: 1 :12800
Output: 3 Name: bbox_8 Dim: 2 :4
Output: 4 Name: bbox_16 Dim: 0 :1
Output: 4 Name: bbox_16 Dim: 1 :3200
Output: 4 Name: bbox_16 Dim: 2 :4
Output: 5 Name: bbox_32 Dim: 0 :1
Output: 5 Name: bbox_32 Dim: 1 :800
Output: 5 Name: bbox_32 Dim: 2 :4
Output: 6 Name: kps_8 Dim: 0 :1
Output: 6 Name: kps_8 Dim: 1 :12800
Output: 6 Name: kps_8 Dim: 2 :10
Output: 7 Name: kps_16 Dim: 0 :1
Output: 7 Name: kps_16 Dim: 1 :3200
Output: 7 Name: kps_16 Dim: 2 :10
Output: 8 Name: kps_32 Dim: 0 :1
Output: 8 Name: kps_32 Dim: 1 :800
Output: 8 Name: kps_32 Dim: 2 :10
========================================
generate_bboxes_kps num: 52
Default Version Done! Detected Face Num: 9
LITEORT_DEBUG LogId: ../hub/onnx/cv/scrfd_2.5g_bnkps_shape640x640.onnx
=============== Input-Dims ==============
input_node_dims: 1
input_node_dims: 3
input_node_dims: 640
input_node_dims: 640
=============== Output-Dims ==============
Output: 0 Name: score_8 Dim: 0 :1
Output: 0 Name: score_8 Dim: 1 :12800
Output: 0 Name: score_8 Dim: 2 :1
Output: 1 Name: score_16 Dim: 0 :1
Output: 1 Name: score_16 Dim: 1 :3200
Output: 1 Name: score_16 Dim: 2 :1
Output: 2 Name: score_32 Dim: 0 :1
Output: 2 Name: score_32 Dim: 1 :800
Output: 2 Name: score_32 Dim: 2 :1
Output: 3 Name: bbox_8 Dim: 0 :1
Output: 3 Name: bbox_8 Dim: 1 :12800
Output: 3 Name: bbox_8 Dim: 2 :4
Output: 4 Name: bbox_16 Dim: 0 :1
Output: 4 Name: bbox_16 Dim: 1 :3200
Output: 4 Name: bbox_16 Dim: 2 :4
Output: 5 Name: bbox_32 Dim: 0 :1
Output: 5 Name: bbox_32 Dim: 1 :800
Output: 5 Name: bbox_32 Dim: 2 :4
Output: 6 Name: kps_8 Dim: 0 :1
Output: 6 Name: kps_8 Dim: 1 :12800
Output: 6 Name: kps_8 Dim: 2 :10
Output: 7 Name: kps_16 Dim: 0 :1
Output: 7 Name: kps_16 Dim: 1 :3200
Output: 7 Name: kps_16 Dim: 2 :10
Output: 8 Name: kps_32 Dim: 0 :1
Output: 8 Name: kps_32 Dim: 1 :800
Output: 8 Name: kps_32 Dim: 2 :10
========================================
generate_bboxes_kps num: 138
ONNXRuntime Version Done! Detected Face Num: 23
LITEMNN_DEBUG LogId: ../hub/mnn/cv/scrfd_2.5g_bnkps_shape640x640.mnn
=============== Input-Dims ==============
**Tensor shape**: 1, 3, 640, 640,
Dimension Type: (CAFFE/PyTorch/ONNX)NCHW
=============== Output-Dims ==============
getSessionOutputAll done!
Output: bbox_16: **Tensor shape**: 1, 3200, 4,
Output: bbox_32: **Tensor shape**: 1, 800, 4,
Output: bbox_8: **Tensor shape**: 1, 12800, 4,
Output: kps_16: **Tensor shape**: 1, 3200, 10,
Output: kps_32: **Tensor shape**: 1, 800, 10,
Output: kps_8: **Tensor shape**: 1, 12800, 10,
Output: score_16: **Tensor shape**: 1, 3200, 1,
Output: score_32: **Tensor shape**: 1, 800, 1,
Output: score_8: **Tensor shape**: 1, 12800, 1,
========================================
generate_bboxes_kps num: 34
MNN Version Done! Detected Face Num: 5
LITENCNN_DEBUG LogId: ../hub/ncnn/cv/scrfd_2.5g_bnkps_shape640x640.opt.param
=============== Output-Dims ==============
score_8: c=1,h=12800,w=1
score_16: c=1,h=3200,w=1
score_32: c=1,h=800,w=1
bbox_8: c=1,h=12800,w=4
bbox_16: c=1,h=3200,w=4
bbox_32: c=1,h=800,w=4
kps_8: c=1,h=12800,w=10
kps_16: c=1,h=3200,w=10
kps_32: c=1,h=800,w=10
generate_bboxes_kps num: 16
NCNN Version Done! Detected Face Num: 2
LITETNN_DEBUG LogId: ../hub/tnn/cv/scrfd_2.5g_bnkps_shape640x640.opt.tnnproto
=============== Input-Dims ==============
input.1: [1 3 640 640 ]
Input Data Format: NCHW
=============== Output-Dims ==============
bbox_16: [1 3200 4 ]
bbox_32: [1 800 4 ]
bbox_8: [1 12800 4 ]
kps_16: [1 3200 10 ]
kps_32: [1 800 10 ]
kps_8: [1 12800 10 ]
score_16: [1 3200 1 ]
score_32: [1 800 1 ]
score_8: [1 12800 1 ]
========================================
generate_bboxes_kps num: 49
TNN Version Done! Detected Face Num: 7
Testing Successful !

看起来效果还不错~
本文仅做学术分享,如有侵权,请联系删文。
3D视觉精品课程推荐:
1.面向自动驾驶领域的多传感器数据融合技术
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码) 3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进 4.国内首个面向工业级实战的点云处理课程 5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解 6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦 7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化 8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
9.从零搭建一套结构光3D重建系统[理论+源码+实践]
10.单目深度估计方法:算法梳理与代码实现
11.自动驾驶中的深度学习模型部署实战
12.相机模型与标定(单目+双目+鱼眼)
13.重磅!四旋翼飞行器:算法与实战
14.ROS2从入门到精通:理论与实战
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。
▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款

圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~

