

本节目标

搭建一套700行代码的激光SLAM。通过对ALOAM进行修改实验,确定对激光SLAM最核心的技巧,并接上节里程计,完成后端,构建较大场景(轨迹约2km)地图。
预期效果:

rosbag数据:
https://pan.baidu.com/s/1o-noUxgVCdFkaIH21zPq0A
提取码: mewi
程序:https://gitee.com/eminbogen/one_liom

实际地图与ALOAM效果

因为先试了一下LOAM跟丢了,所以用完整走完的ALOAM来进行实验。蓝色为里程计结果,绿色为后端优化后的效果,差距非常大。第三张图是跟丢的LOAM。




ALOAM修改实验

棱匹配与曲率排序
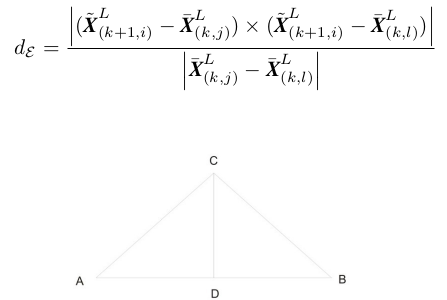
棱匹配,是希望图像中曲率较大的点匹配到对应的棱上,与点面匹配对应。在下图中c可以当做我们的当前帧的点,ab为前一帧棱上点,作公式如下,即CA×CB/AB,由于叉乘为|CA|*|CB|*sin,所以在AB点固定时角度越接近0度或180度,两向量越小,分子就越小,可以将d作为损失量进行优化。实验后来发现这个没啥用。
程序:
Eigen::Matrix nu = (lpc - lpa).cross(lpc - lpb); Eigen::Matrix de = lpa - lpb; residual[0] = nu.x() / de.norm(); residual[1] = nu.y() / de.norm(); residual[2] = nu.z() / de.norm();
曲率排序是在选取特征点对于16线,每线分为6区域,每区域内按曲率高低录取面点和棱点。实验后来发现这个很有用。
程序:
//利用cloudScanEndInd将每条线分成六块,每块使用sort排序,并从最平缓的4个点录入laserCloudplane,录入后对周围点作不选取的标志
for(int i=0;i<16;i++)
{
//每条线起止
int start_num = cloudScanEndInd[i];
int end_num = cloudScanEndInd[i+1];
//分六块
for(int j=0;j<6;j++)
{
int start_num_temp = start_num+ ((end_num-start_num)/6)*j;
int end_num_temp = start_num+ ((end_num-start_num)/6)*(j+1);
//块内排序cloudSortInd会从1,2,3,4这种顺序变成乱序,乱序后指代的点曲率从小到大排列
std::sort (cloudSortInd + start_num_temp, cloudSortInd + end_num_temp, comp);
//计数4个
int plane_num=0;
//k要在区间内,点要小于5个
for(int k=start_num_temp;k
关注
打赏
最近更新
- 深拷贝和浅拷贝的区别(重点)
- 【Vue】走进Vue框架世界
- 【云服务器】项目部署—搭建网站—vue电商后台管理系统
- 【React介绍】 一文带你深入React
- 【React】React组件实例的三大属性之state,props,refs(你学废了吗)
- 【脚手架VueCLI】从零开始,创建一个VUE项目
- 【React】深入理解React组件生命周期----图文详解(含代码)
- 【React】DOM的Diffing算法是什么?以及DOM中key的作用----经典面试题
- 【React】1_使用React脚手架创建项目步骤--------详解(含项目结构说明)
- 【React】2_如何使用react脚手架写一个简单的页面?


微信扫码登录