点击上方“3D视觉工坊”,选择“星标”
干货第一时间送达

作者丨paopaoslam
来源丨泡泡机器人SLAM
标题:Greedy-Based Feature Selection for Efficient LiDAR SLAM
作者:Jianhao Jiao , Yilong Zhu , Haoyang Ye , Huaiyang Huang, Peng Yun , Linxin Jiang ,Lujia Wang , Ming Liu
来源:2021 IEEE International Conference on Robotics and Automation (ICRA)
编译:路超
审核:Zoe,王靖淇

摘要

现代Lidar-SLAM已经在大尺度,真实场景具有极好的效果。然而,因为昂贵的数据关联和非线性优化导致它们具有高延迟性。本文表明主动选取特征子集可显著提高L-SLAM系统的准确性和效率。我们将特征选择问题描述为一个在基数约束下的组合优化问题,应用随机贪心算法实时逼近最优结果以保持信息矩阵的特征值属性(spectral attributes)。为了避免退化情况的估计,我们也提出了一个通用的策略来评估环境退化并且在线修改特征数量。提出的特征选择已整合到multi-LIDAR SLAM系统中。我们通过涵盖两个传感器设置和计算平台上的各种场景的广泛实验来验证这个增强的系统。与最先进的 Lidar-SLAM 系统相比,我们的方法表现出较低的定位误差和更快的速度。为了有益于社区,我们已经开源代码:https://ram-lab.com/file/site/m-loam/
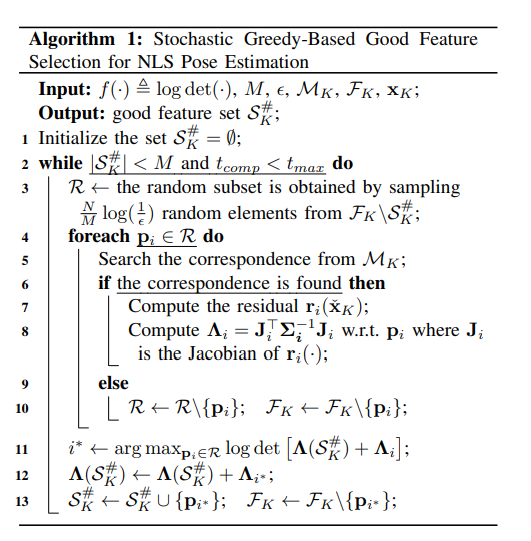
算法1:基于随机贪婪算法的Good Feature选取。
译者解读:
算法输入:特征点信息矩阵(根据曲率选取的线面特征)行列式的log,good feature的数量,退化因子,参考地图(文章说明对于Lidar-SLAM的Odometry选取当前时刻之前0.5s建立的地图作为参考地图),当前帧所有特征的集合,初始位姿。
输出:当前Lidar 帧good feature的集合。
第2行,循环在满足一下条件之一会退出:(1)选取good feature的时间超过最大阈值时间;(2)第二个条件限制了good feature的最大数量,因为log det()是收益递减的子模块,提前终止不会导致太多的信息损失。
第4-10行:随机采样在当前帧关联的地图的点集作为子集,对于子集中的每一个特征计算残差,如果之前已经选取过跳过该过程。
第11-13行:选择导致目标最大增强的特征。然后对算法中的三个信息矩阵进行更新。

图1. 不同序列上的退化因子。
译者解读:在所有特征集合上计算信息矩阵的行列式的对数,通过实验判断如果大于42就是退化场景,good feature的数量只选取特征数量的20%
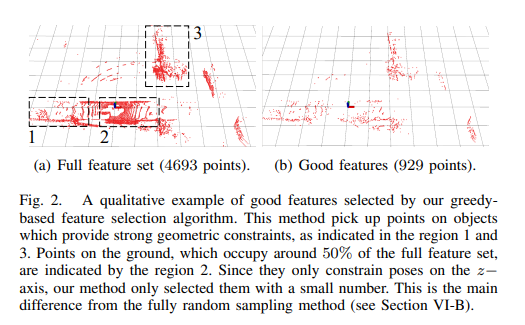
图2. good feature选取的定性评估。图中1,3区域是几何特征明显其余,可以提供强约束,区域2是地面点云,地面点云只会约束Z方向,但是地面点云占比当期特征点云的一般,因此在good feature选取时只选取少量地面点云,这是和随机采样选取点云的主要不同。

图3. M-LOAM-GF的pipeline。
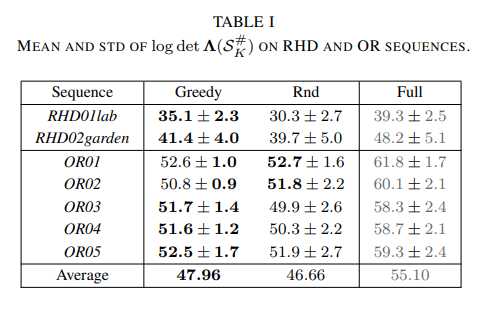
表I:在RHD和OR序列上根据不同方法选取特征点云的信息矩阵的行列式的对数的均值和STD。(该论文以特征点信息矩阵特征值的对数作为评估当前点集是否为good feature的metric)
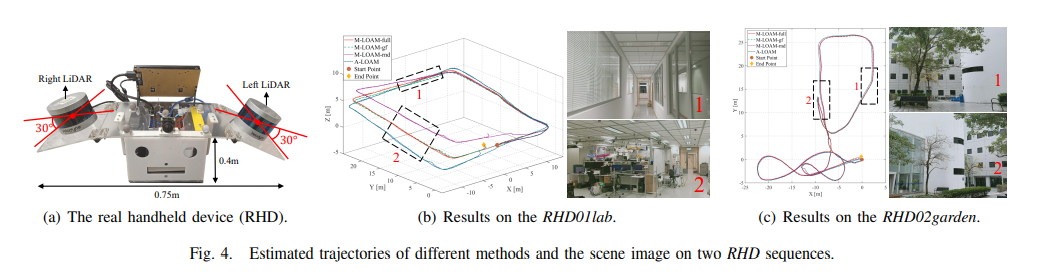
图4. 在两个手持设备上采集真实场景序列的轨迹对比。
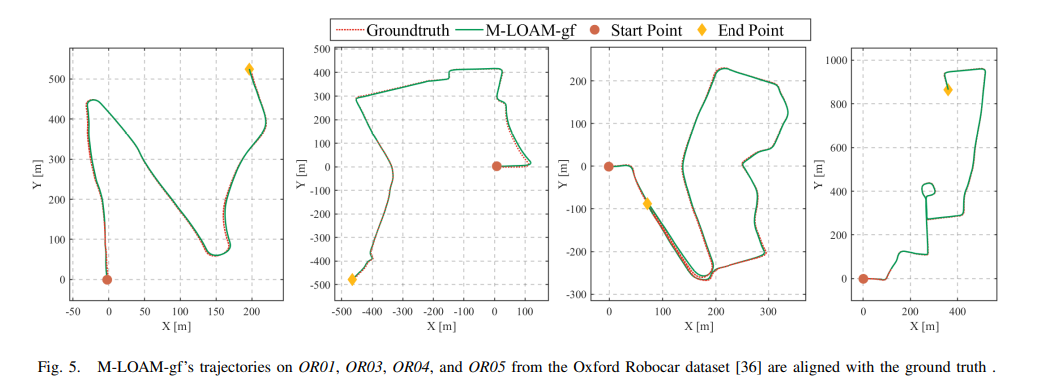
图5.M-LOAM-gfOxford Robocar 数据集中序列OR01,OR03,OR04,和OR05与真值对齐的轨迹
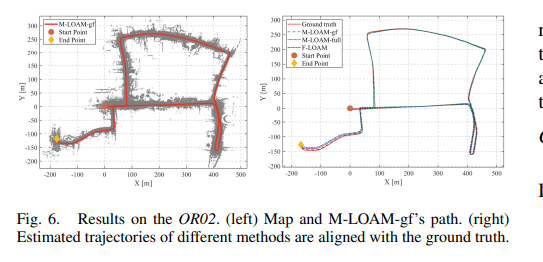
图6. 不同方法在OR02序列上估计的轨迹,对齐到真值。左侧是M-LOAM-gf的轨迹,右侧是估计的path。

表II:在OR序列上绝对位置误差ATE(黑色加粗表示两个最好的结果)
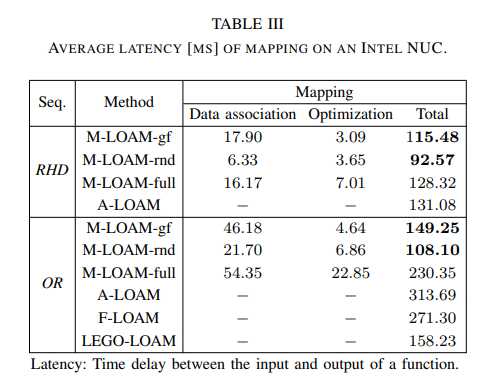
表III:在Intel-NUC上的平均耗时。

Abstract
Modern LiDAR-SLAM (L-SLAM) systems have shown excellent results in large-scale, real-world scenarios. However, they commonly have a high latency due to the expensive data association and nonlinear optimization. This paper demonstrates that actively selecting a subset of features significantly improves both the accuracy and efficiency of an L-SLAM system. We formulate the feature selection as a combinatorial optimization problem under a cardinality constraint to preserve the information matrix’s spectral attributes. The stochastic greedy algorithm is applied to approximate the optimal results in real-time. To avoid ill-conditioned estimation, we also propose a general strategy to evaluate the environment’s degeneracy and modify the feature number online. The proposed feature selector is integrated into a multi-LiDAR SLAM system. We validate this enhanced system with extensive experiments covering various scenarios on two sensor setups and computation platforms. We show that our approach exhibits low localization error and speedup compared to the state-of-the-art L-SLAM systems. To benefit the community, we have released the source code: https://ram-lab.com/file/site/m-loam.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章。
百度网盘提取码:scqh
本文仅做学术分享,如有侵权,请联系删文。
3D视觉工坊精品课程官网:3dcver.com
1.面向自动驾驶领域的多传感器数据融合技术
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码) 3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进 4.国内首个面向工业级实战的点云处理课程 5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解 6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦 7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化 8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
9.从零搭建一套结构光3D重建系统[理论+源码+实践]
10.单目深度估计方法:算法梳理与代码实现
11.自动驾驶中的深度学习模型部署实战
12.相机模型与标定(单目+双目+鱼眼)
13.重磅!四旋翼飞行器:算法与实战
14.ROS2从入门到精通:理论与实战
15.国内首个3D缺陷检测教程:理论、源码与实战
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。
▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~


