
来源丨CVer
2022第二届城市规模点云语义理解挑战赛
又双叒开赛啦!
关于挑战赛
Urban3D挑战赛旨在通过提供全新的大规模点云数据集(SensatUrban以及STPLS3D),为城市规模点云语义理解提供技术交流的新思路,为城市级的智能点云应用提供新路径,并由此搭建一个长期互相学习与交流的新平台。
本届挑战赛本届Urban3D挑战赛将在去年的基础上,增设更多赛道与专业奖项,大幅提高赛事奖金,诚邀更多对三维视觉感兴趣的同行参赛,为挑战赛注入更多崭新活力。
$6000大赛奖金
在顶会ECCV2022分享工作的机会
更多精彩,期待与你共同开启!
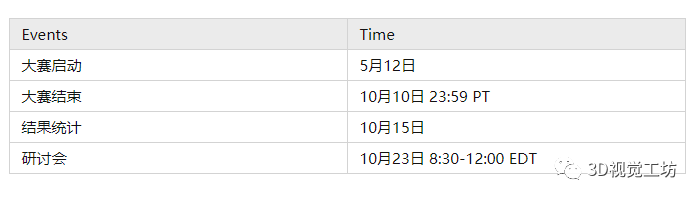
(即日起至2022年10月10日)
赛道1:城市规模点云语义分割


此赛道基于城市规模点云数据集SensatUrban(CVPR'21),该数据集由英国三个城市(Birmingham, Cambridge, York)的 7.6 km^2 的城市区域组成,包含近 30 亿个具有详细语义标注的3D 点组成。给定指定的训练数据,参赛者需要设计方法为测试集中的每个点计算语义标签,用于最后的性能评测。
赛道2:城市规模点云实例分割
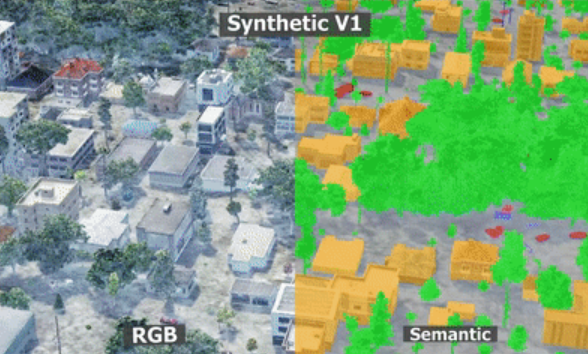
此赛道基于城市规模点云合成数据集STPLS3D(Arxiv'22)。该数据集包含16平方公里的合成城市场景,点云中的每个点都具有丰富的语义标签(18种语义类别)及实例标签(14种实例类别)。给定指定的训练数据,参赛者需要设计方法为测试集中的每个点计算语义及实例标签,用于最后的性能评测。
奖金设置本届挑战赛总奖金池 $6000,两个赛道分设前三名,前三名的奖金如下:
-
第一名 $1,500 USD
-
第二名 $1,000 USD
-
第三名 $500 USD
所有获奖项目均颁发证书,获奖者将被邀请至 Urban3D@ECCV 2022 workshop 进行论文分享!
比赛安排
-
为保证公平的评估,请使用学校邮箱或者公司邮箱注册参赛,请勿使用qq,163, gmail等邮箱进行注册
-
每位参赛者最多提交5次结果
-
语义分割赛道提交格式如下:
zip ├── description.txt ├── birmingham_block_2.label ├── birmingham_block_8.label ├── cambridge_block_15.label ├── cambridge_block_16.label ├── cambridge_block_22.label └── cambridge_block_27.label
-
实例分割赛道提交格式如下:
zip
├── description.txt
├── 26_points_GTv3.predict
├── 27_points_GTv3.predict
└── 28_points_GTv3.predict
参赛须知
-
参赛截止日期:2022年10月10日
-
请在对应赛道的codalab平台进行性能评估
-
为保证公平的比较,请勿使用其他公开或私有的数据集进行网络的预训练
语义分割赛道参赛网址:https://
https://competitions.codalab.org/competitions/31519
实例分割赛道参赛网址:
https://codalab.lisn.upsaclay.fr/competitions/4646
了解更多
比赛官网: https://https://urban3dchallenge.github.io/
SensatUrban 数据集: https://github.com/QingyongHu/SensatUrban
STPLS3D 数据集: https://www.stpls3d.com/
咨询邮箱:huqingyong15@outlook.com
本文仅做学术分享,如有侵权,请联系删文。
3D视觉工坊精品课程官网:3dcver.com
1.面向自动驾驶领域的多传感器数据融合技术
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码) 3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进 4.国内首个面向工业级实战的点云处理课程 5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解 6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦 7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化 8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
9.从零搭建一套结构光3D重建系统[理论+源码+实践]
10.单目深度估计方法:算法梳理与代码实现
11.自动驾驶中的深度学习模型部署实战
12.相机模型与标定(单目+双目+鱼眼)
13.重磅!四旋翼飞行器:算法与实战
14.ROS2从入门到精通:理论与实战
15.国内首个3D缺陷检测教程:理论、源码与实战
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿
▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款

圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~

