
论文阅读:Semantic-Direct Visual Odometry
Motivation
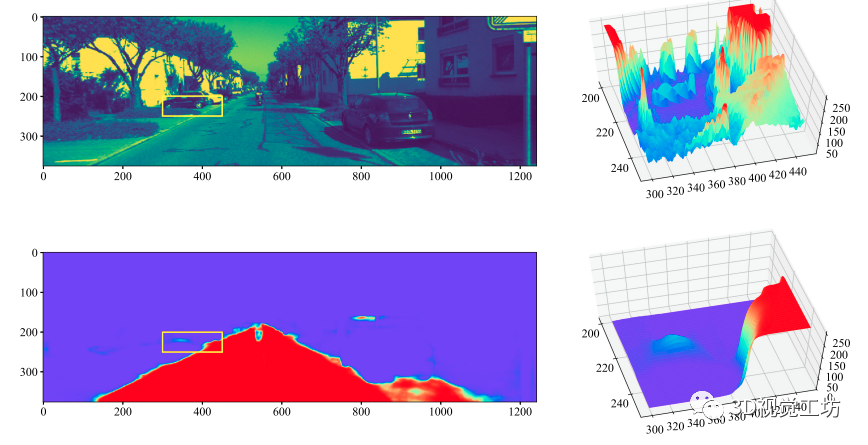
虽然直接法SLAM在无纹理环境更加鲁棒,但是由于灰度图像的凸性特征导致光度误差的凸性仅在一个小区域内保持的问题,所以传统的直接法视觉SLAM在当跟踪点有较大位移时,可能陷入次优局部极小解,具体问题描述如下图,左边分别是对应区域的灰度图和语义概率图,右图相应的三维可视化,灰度图像保留了对象的细节,而道路的概率主要在道路边界上进行生成,对于语义对象边界上的点,语义概率的凸性在比灰度图像更大的区域中成立。
另外,目前虽然也有可以跟踪动态物体的SLAM,但是他们绝大部分都是使用重投影误差之类的优化项,这些都是6个自由度。这其实与现实世界并不符合,比如说,大部分汽车只有3个自由度,2个自由度在平移(道路平面),1个自由度在旋转(汽车自身法向量)。所以消除与物理意义不对应的自由度也是有必要的。对应这个问题的解决办法,作者是选择将约束表示为机械关节,因为机械关节的运动是有限制的,从而减少了自由度。
-
所提出的SDVO是第一个利用语义概率直接匹配的视觉单目SLAM系统。
-
通过将语义概率的直接对齐集成到LDSO中,提高了定位性能,优于ORB-

