作者丨桃子 好困
来源丨新智元

今天,ECCV开奖了!
根据最新公开的论文录用列表,今年ECCV共接收了1629篇。

今年的投稿理论上至少有8170篇(最后一个中稿ID),由此预估,录用率还不到20%。
2020年ECCV共收到有效投稿5025篇,接收论文1361篇,接收率为27%。
2018年共有2439篇投稿,接收776篇,录用率为31.8%。
通过对比发现,ECCV 2022论文接收投稿数直接拉满,比2020年还要多大约3000多篇。
而录用的论文这次比ECCV 20仅多出300多篇,很显然,中稿率下降也是情理之中。
除了我们熟知的CVPR、ICCV,ECCV(欧洲计算机视觉国际会议)也是计算机视觉三大国际顶级会议之一,每两年召开一次。
ECCV 2022 将在10月23日-27日的以色列特拉维夫(Tel-Aviv)举行。和刚刚过去的CVPR同样,这个会议也将采取线下和线上混合形式召开。

网友晒中奖
ECCV 22论文录取列表刚刚公布不久,网友们早就迫不及待地晒出了自己成绩单。
自己的1篇、2篇、3篇论文......都被ECCV接收了。

还有一位来自旷视的研究者黄哲威发文表示,
自己的论文「RIFE: Real-Time Intermediate Flow Estimation for Video Frame Interpolation」终于被ECCV接收了。
这篇论文曾被CVPR 2021、ICCV 2021、AAAI 2022,以及CVPR 2022连拒了4次,可见被顶会录用过程极其艰难。

三年了,终于有一篇自己的顶会。

还有网友晒出,自己喜提reject,还将自己称为CV Reject的收割者。
不管怎么说,再接再厉吧!

举个例子
接下来,我们选取了其中的两篇来做一下简单的介绍。
第一篇由罗切斯特理工学院(RIT)教授Dongfang Liu和普渡大学(Purdue)教授Xiangyu Zhang共同指导,普渡大学博士学生Zhiyuan Cheng为第一作者。

这篇题为「Physical Attack on Monocular Depth Estimation in Autonomous Driving with Optimal Adversarial Patches」的论文,最为突出的一点在于,这是针对自动驾驶深度估计攻击的第一个工作。

论文地址:https://drive.google.com/file/d/1p6HX9G0SM5MugeOXoHQpvK0HtHFhoNW8/view?usp=sharing
深度学习极大的提升了单目深度估计的性能,这是完全基于视觉的自动驾驶系统(如特斯拉)中的关键模块。
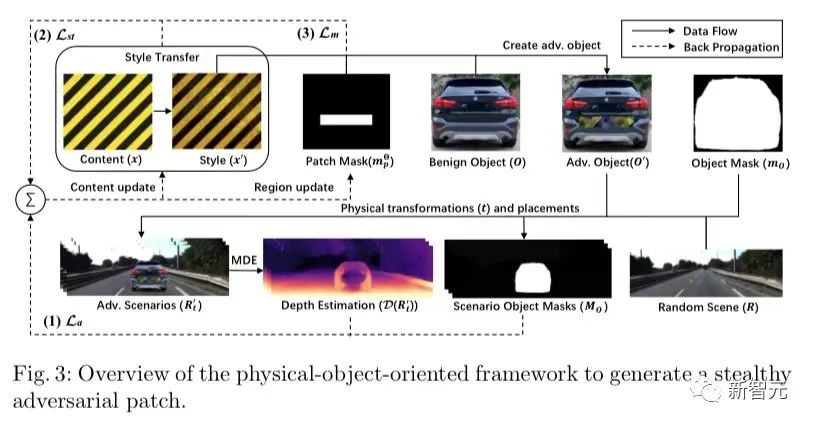
在这项工作中,作者开发了一种针对基于学习的单目深度识别模型的攻击。具体地,作者使用一种基于优化的方法,系统地生成了隐蔽的、面向物理世界真实物体的对抗性补丁,以干扰对物体距离的估计。
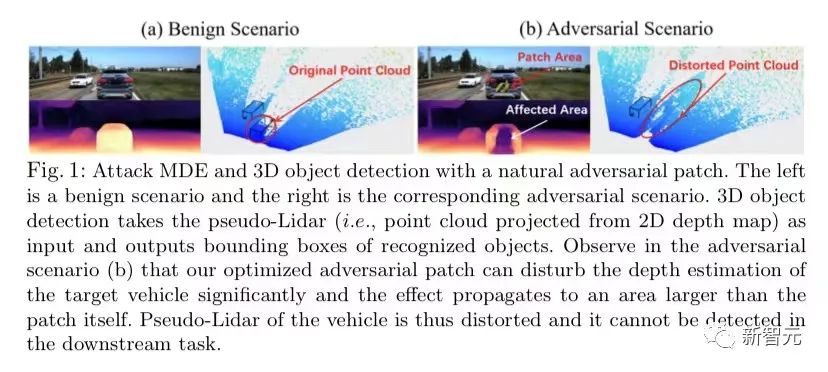
作者通过面向物体的对抗性设计、对敏感区域的定位和自然风格伪装来平衡作者攻击的隐蔽性和有效性。利用真实世界的驾驶场景,作者评估了本工作针对最前沿的单目深度估计模型和自动驾驶中的代表性下游任务(3D物体检测)的攻击效果。
实验结果表明,本方法可以为不同的目标物体和模型生成隐蔽、有效和稳健的对抗性补丁,并在物体检测中实现了超过6米的平均深度估计误差和超过93%的攻击成功率,补丁面积仅为车辆后部面积的1/9。
在三条不同的驾驶路线上用真实车辆进行的现场测试表明,作者造成了超过6米的平均深度估计误差,并将下游任务中连续视频帧的物体检测率从90.70%降低到了5.16%。

第二篇题为,「A Cloud 3D Dataset and Application-Specific Learned Image Compression in Cloud 3D」来自德州大学圣安东尼奥分校,作者分别是Tianyi Liu,Sen He,Vinodh Kumaran Jayakumar和Wei Wang。
在Cloud 3D系统中,例如Cloud Gaming和Cloud Virtual Reality(VR),3D应用的画面在云端数据中心渲染,然后压缩后发送到客户端供用户和游戏玩家查看和交互。
为了同时实现低延迟和高图像质量,快速、高压缩率和高质量的图像压缩技术备受青睐。由于基于深度学习的神经网络图像压缩,在图像压缩中逐渐表现了出色效果。
本文主要探讨如何加速基于神经网络的图像压缩方法,以使其更适合云端图形渲染系统。作者采用了低复杂度和应用专用的AI模型来减少计算时间,同时保证图像质量。
作者的方法基于三个关键点:
(1)由于 3D 应用程序渲染的图像是高度同质化的,与通用训练数据集相比,application-specific数据集可以提高模型的rate-distortion性能;
(2) 3D 应用程序的图像画面往往没有自然照片那么复杂,这也使得使用不太复杂的模型进行更快的压缩变得可行;
(3)随着深度学习模型的简化,我们可以动态提高压缩任务的分片大小,从而充分利用GPU算力资源,提高并行度。
通过在六个游戏图像数据集上进行评估,我们的方法具有与SOTA压缩算法相似的率失真性能,同时获得约 5 到 9 倍的加速并将压缩时间减少到小于 1 秒(0.74 秒)。
从而将深度学习图像压缩技术在Cloud 3D系统中的应用,又向前推动了一小步。
参考资料:
https://eccv2022.ecva.net/submission/list-of-accepted-papers-ids/
本文仅做学术分享,如有侵权,请联系删文。
3D视觉工坊精品课程官网:3dcver.com
1.面向自动驾驶领域的多传感器数据融合技术
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码) 3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进 4.国内首个面向工业级实战的点云处理课程 5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解 6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦 7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化 8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
9.从零搭建一套结构光3D重建系统[理论+源码+实践]
10.单目深度估计方法:算法梳理与代码实现
11.自动驾驶中的深度学习模型部署实战
12.相机模型与标定(单目+双目+鱼眼)
13.重磅!四旋翼飞行器:算法与实战
14.ROS2从入门到精通:理论与实战
15.国内首个3D缺陷检测教程:理论、源码与实战
16.基于Open3D的点云处理入门与实战教程
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。
▲长按加微信群或投稿
▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~


