人工智能渗入到越来越多领域,以计算机视觉为主的相关应用更是呈现爆发性增长,国内外资本对AI视觉兴趣只增不减,自动驾驶、工业视觉、AR/VR、测量测绘、移动机器人等领域涌现了大量独角兽公司,呈现了以3D感知、融合定位、重建、测距等多个应用场景的产品。

(标定类基础模块)
(定位感知高级模块)
工坊现已推出了激光/视觉SLAM、视觉-激光-IMU-GPS融合SLAM、视觉三维重建、点云处理、3D点云目标检测、深度估计、结构光三维重建、相机模型与标定、模型部署、四旋翼无人机等多门课程。授课老师均为国内一线大厂算法工程师和海内外高校博士,代码和数据开源,希望能够通过讲师的一些经验,帮大家快速进步,少踩坑!为了回馈广大粉丝的厚爱,现推出中秋课程满减活动,有效时间9.10~9.12号!

▲扫描二维码领券,全部课程享受9折优惠!(9.10~9.12)
咨询通道:
1、搜索QQ群号:450735205,或扫描以下二维码入群

2、搜索微信号:dddvision,或扫描以下二维码咨询课程非技术问题/开票等

主要课程
-
自动驾驶系列
-
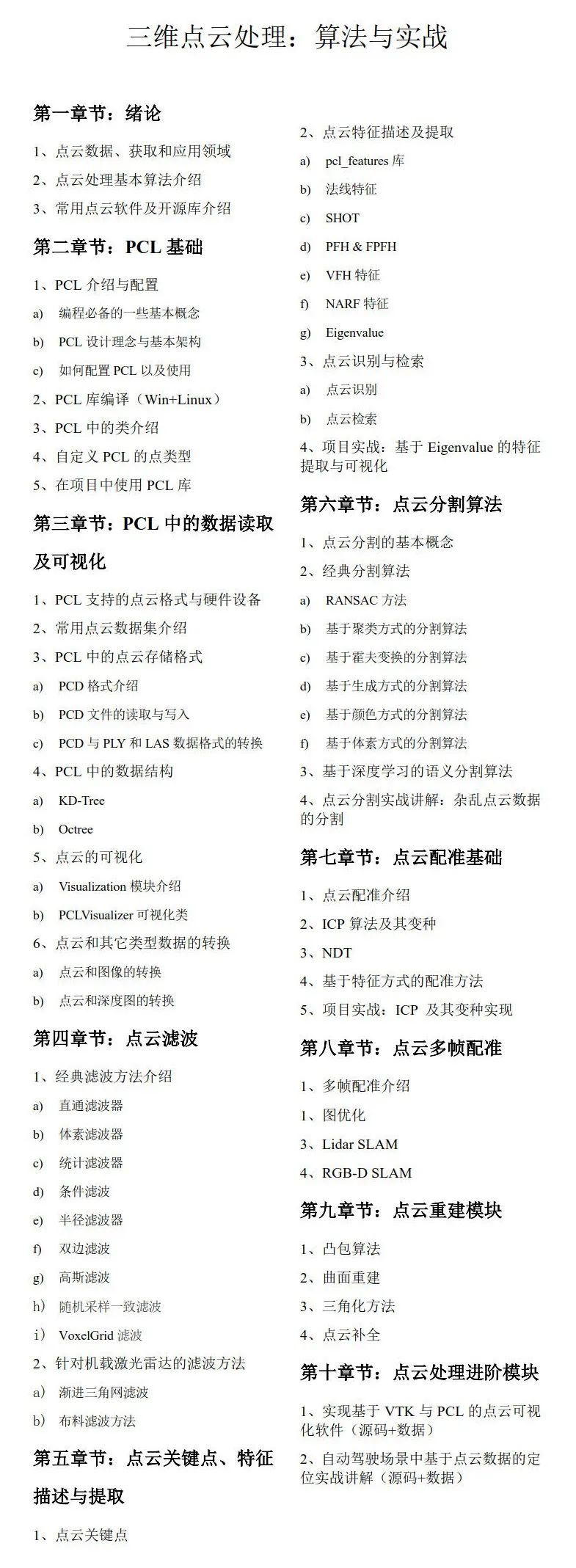
点云处理系列
-
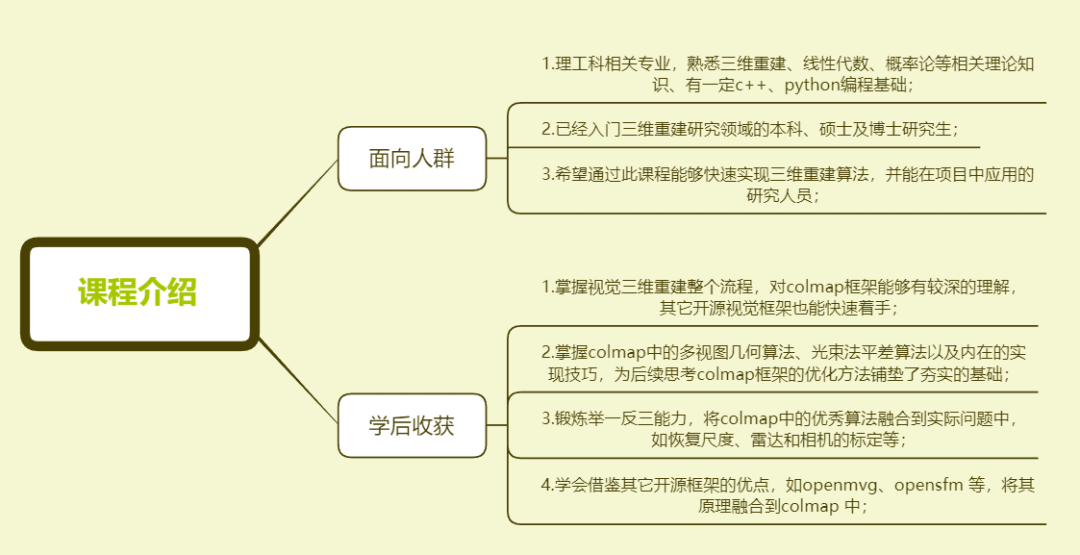
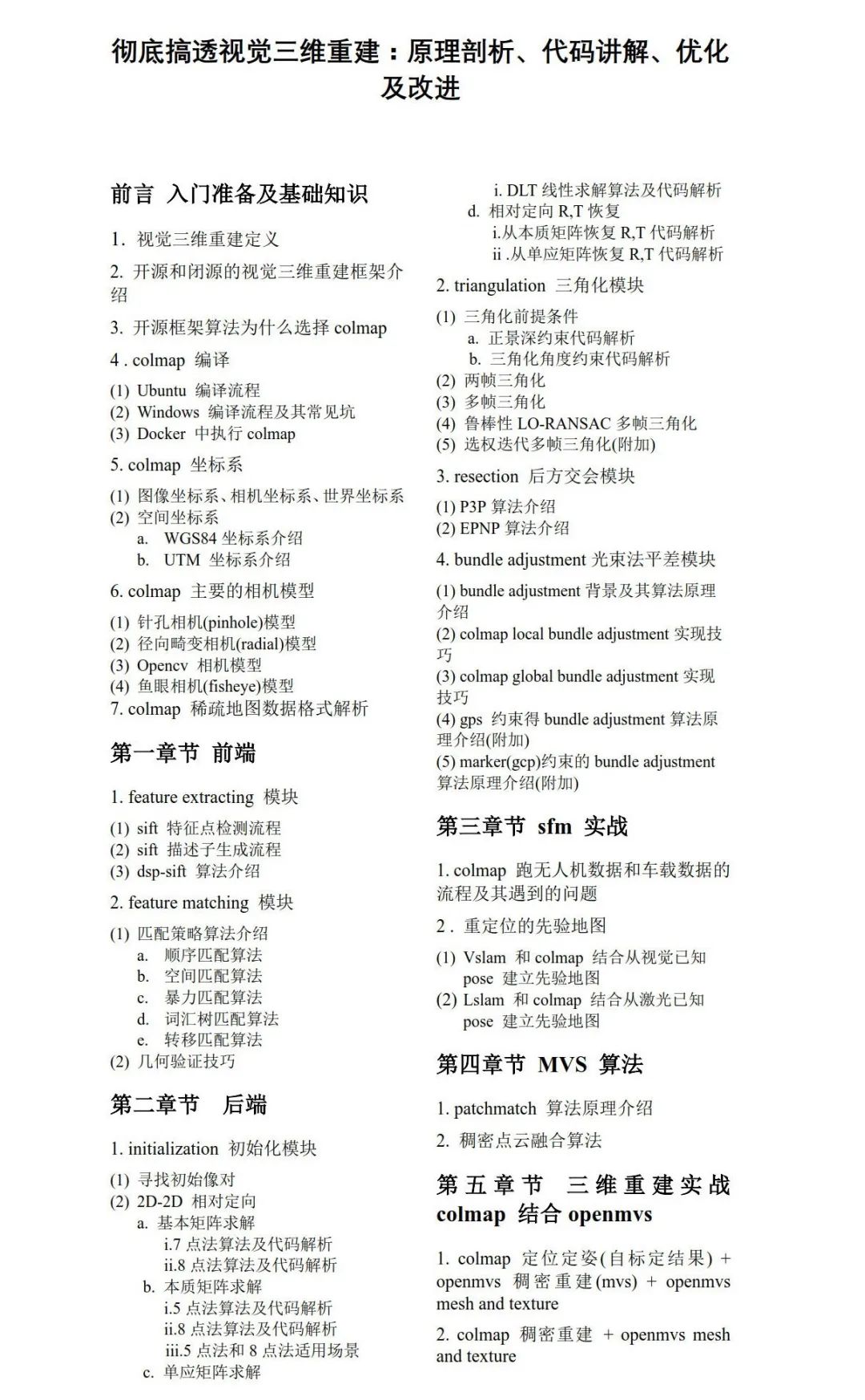
三维重建系列
-
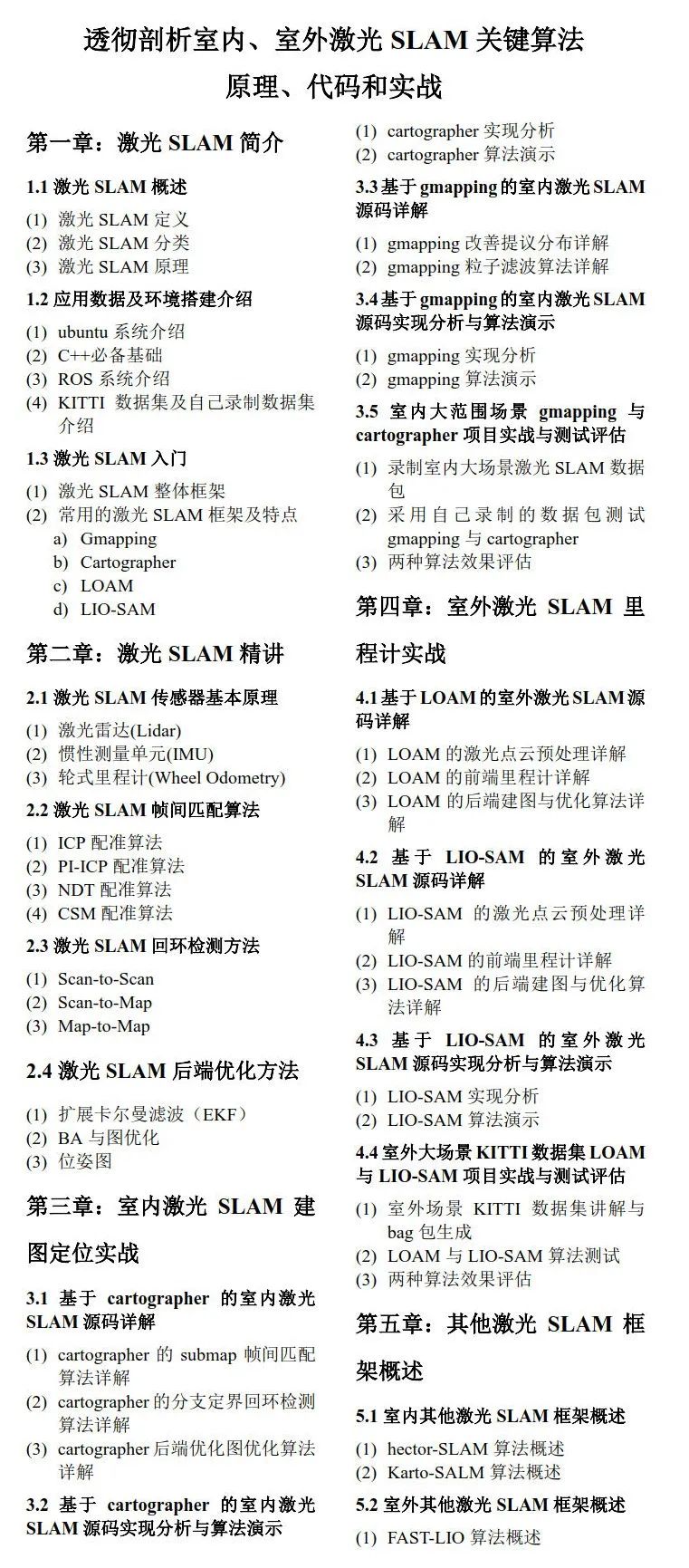
SLAM系列
-
深度估计系列
-
3D目标检测系列
-
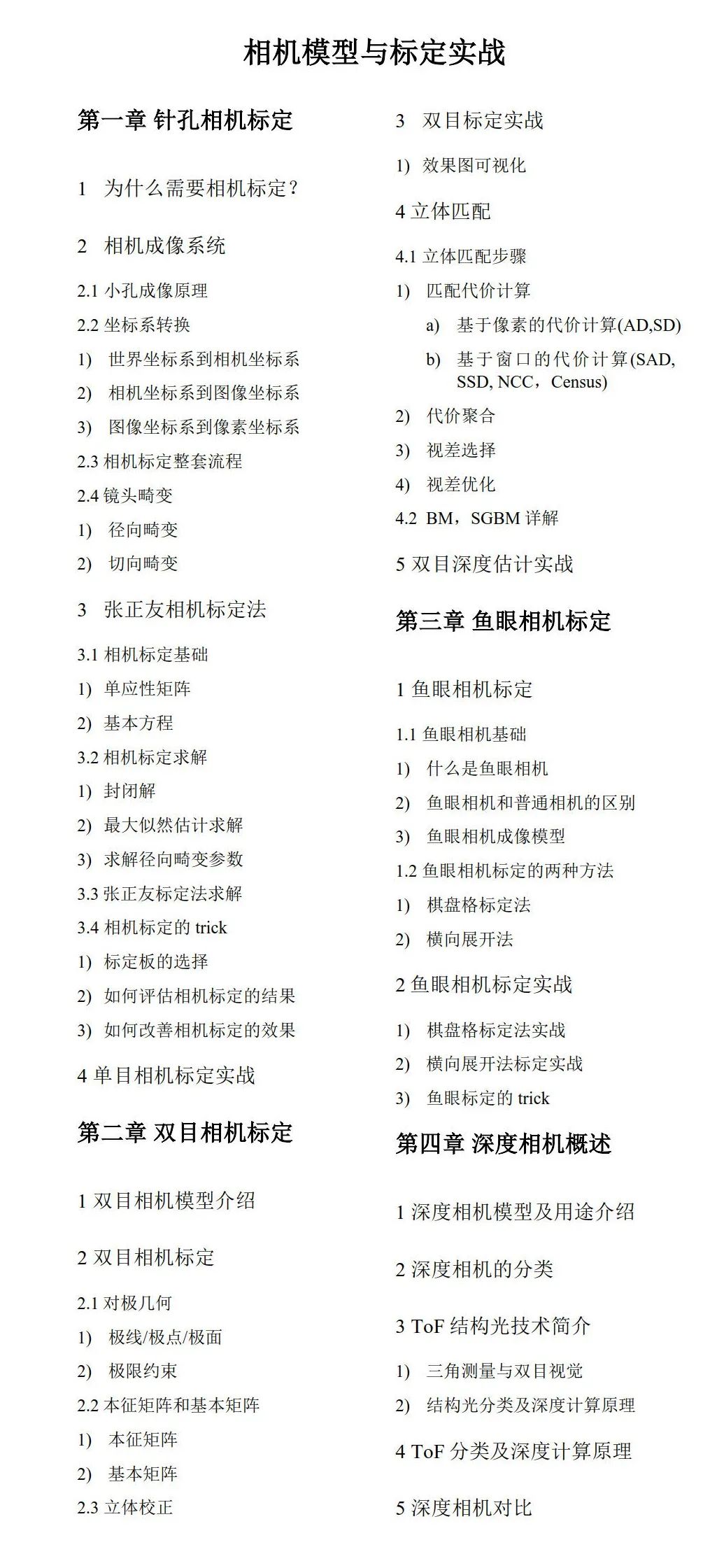
相机模型与标定系列
-
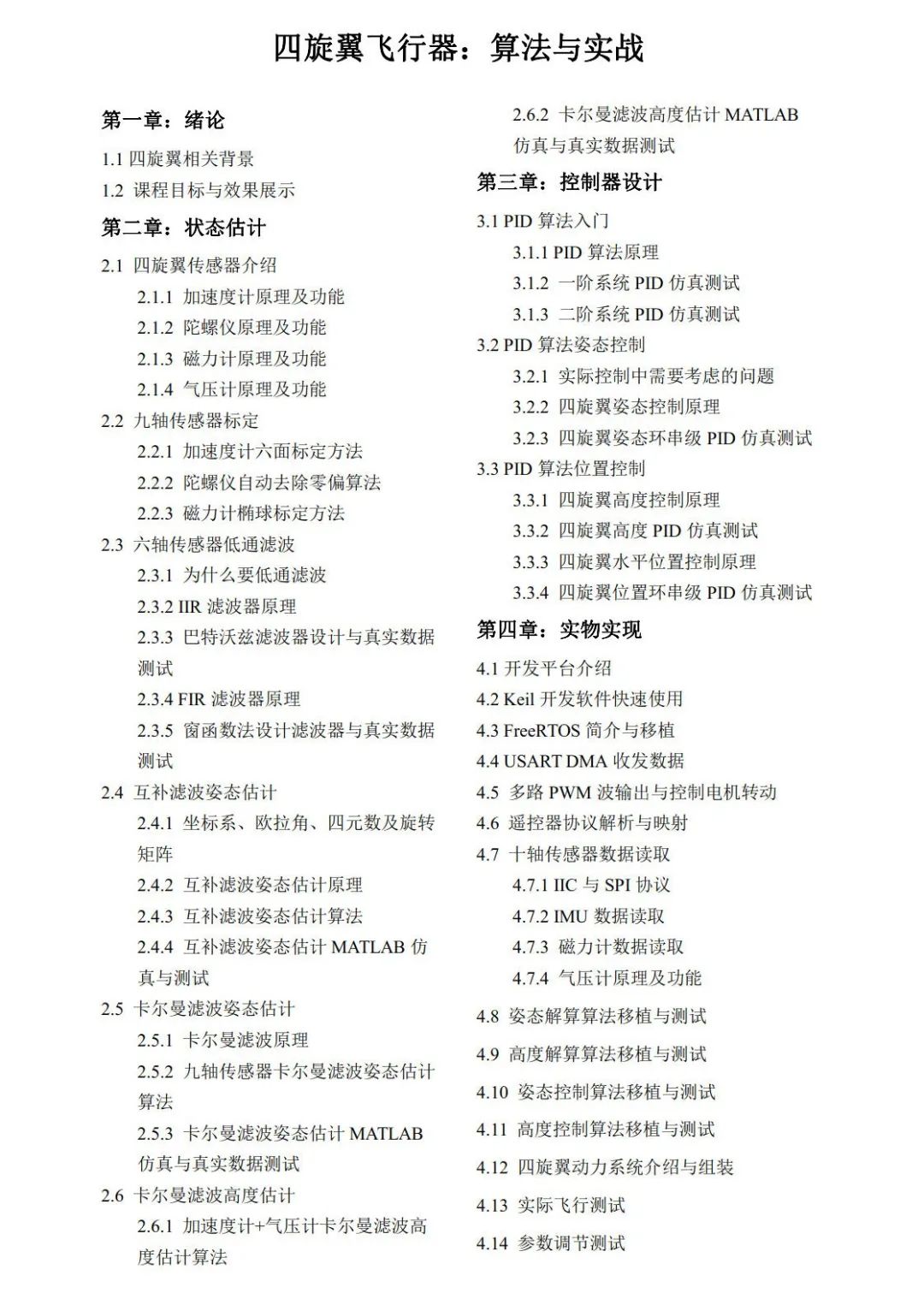
四旋翼无人机系列
-
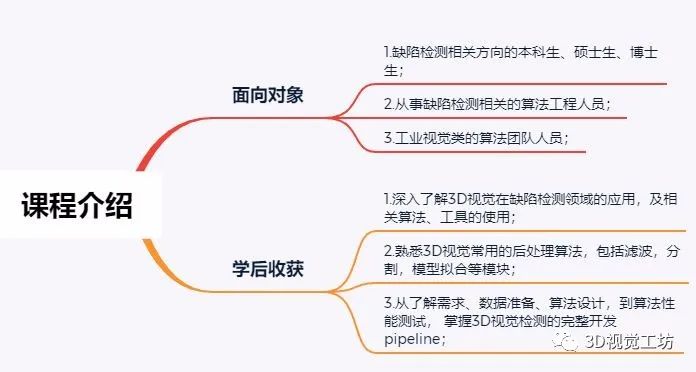
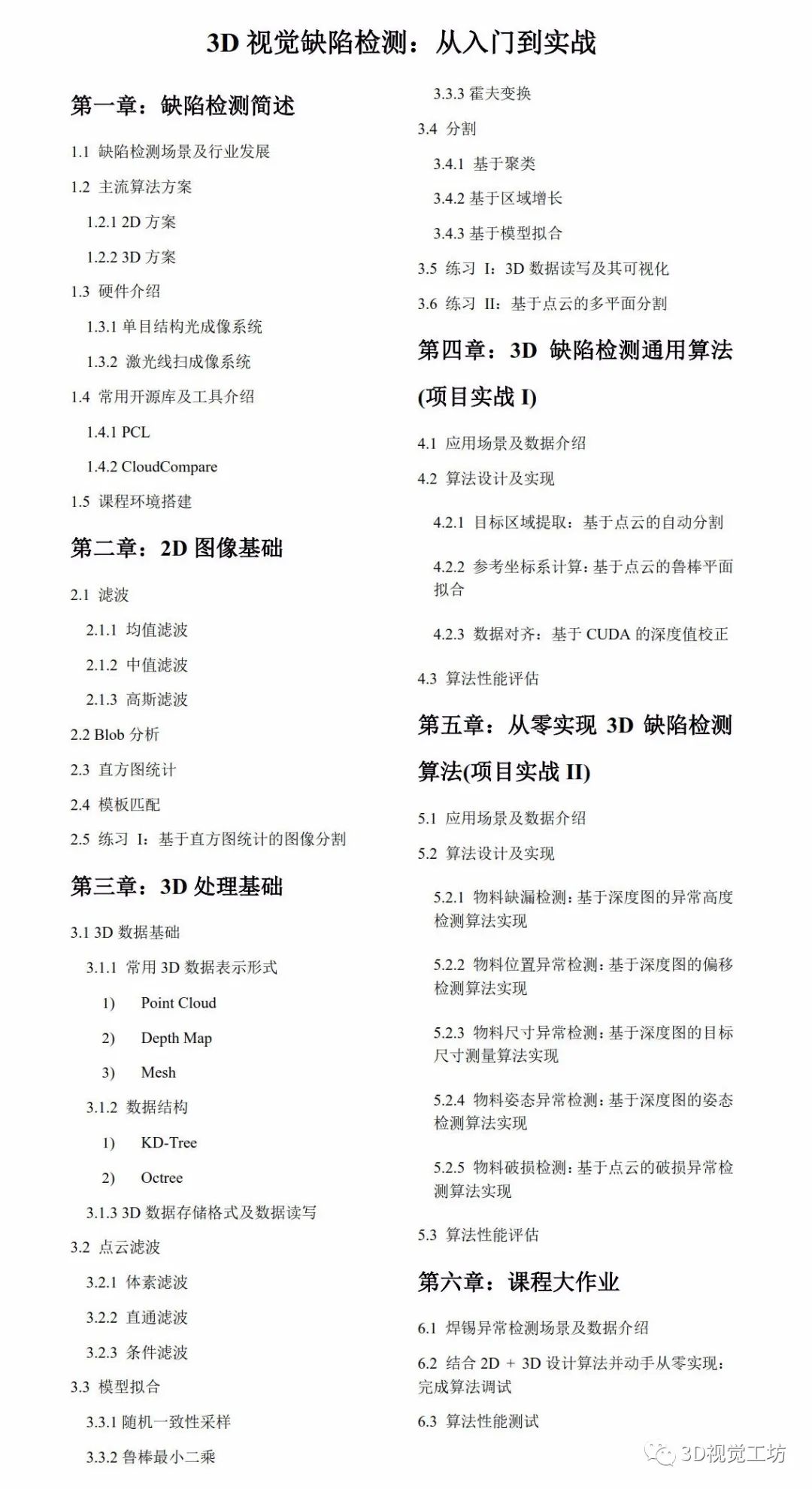
缺陷检测系列
-
大专栏系列(自动驾驶、点云、SLAM、三维重建系列)
自动驾驶系列
主要包含:自动驾驶中的3D点云目标检测、自动驾驶中的深度学习模型部署实战;
(一)自动驾驶中的深度学习模型部署实战

(二)自动驾驶中的深度学习模型部署实战

点云处理系列

三维重建系列
主要包括:视觉三维重建和结构光三维重建。
(一)彻底搞透视觉三维重建
(二)结构光三维重建

 SLAM系列
SLAM系列
主要包括:激光3D SLAM、激光-视觉-IMU-GPS融合SLAM、视觉-惯性SLAM、面向室内室外场景的SLAM教程。
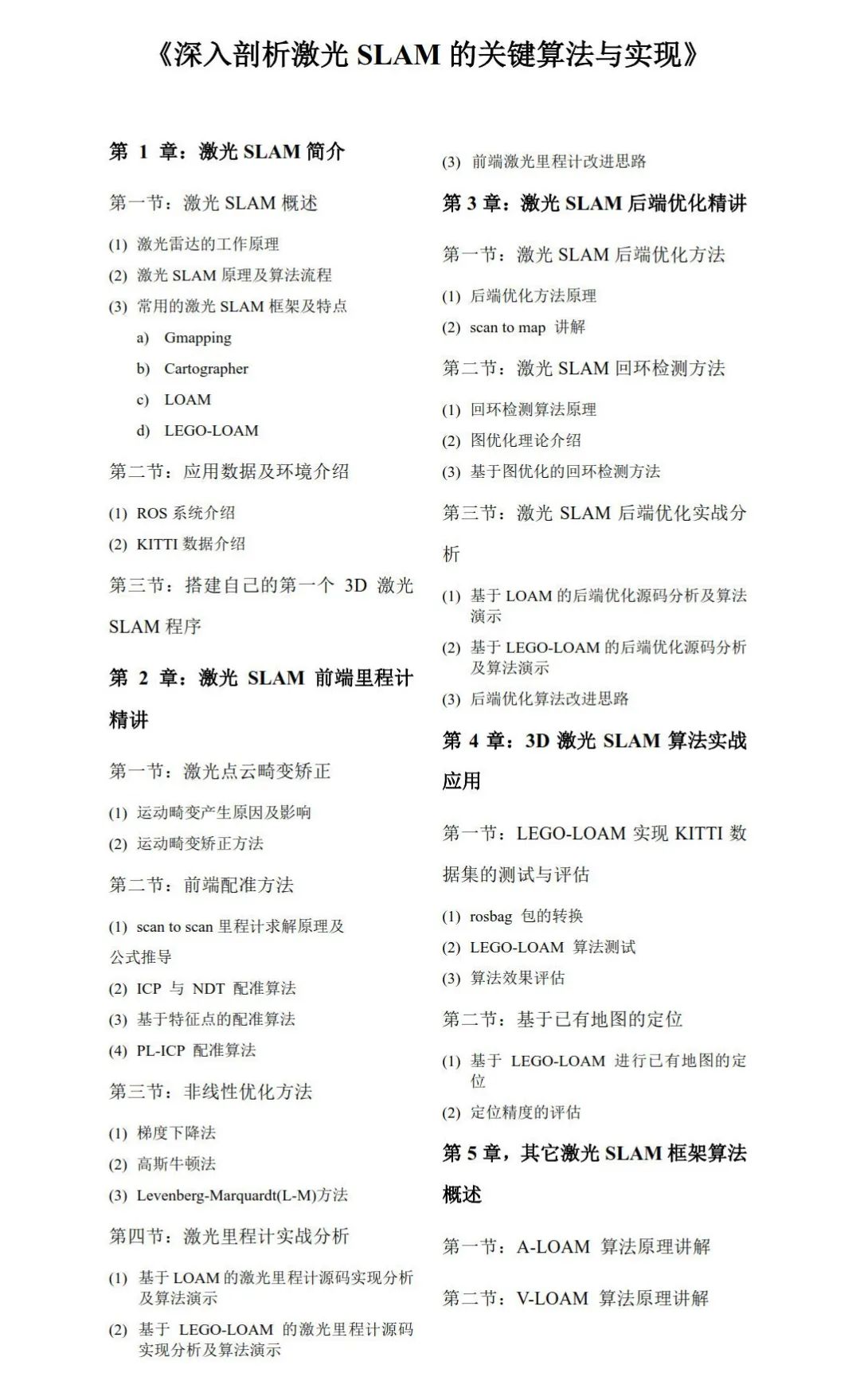
(一)透彻剖析室内、室外激光SLAM关键算法原理、代码和实战

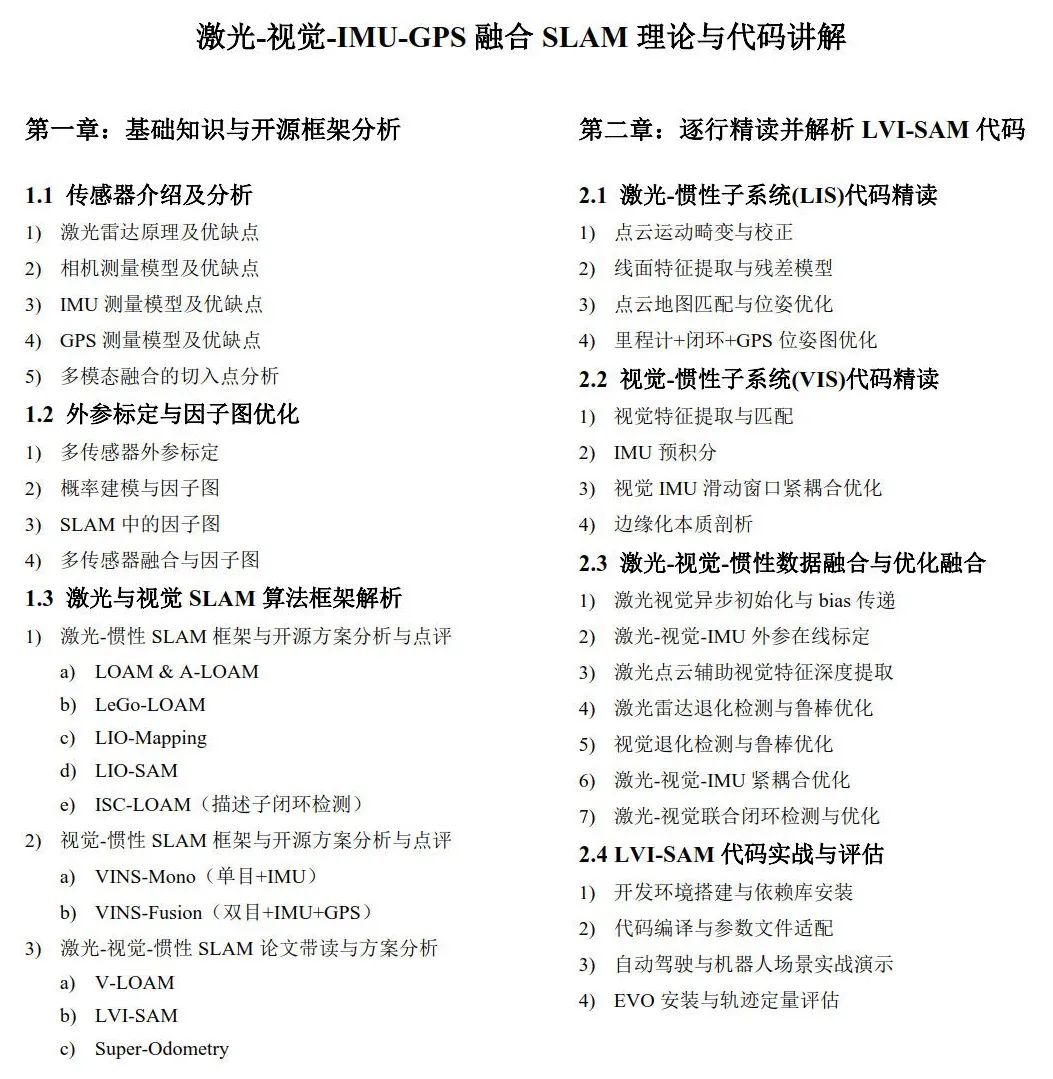
(二)激光-视觉-IMU-GPS融合SLAM理论与代码讲解

(三)彻底搞懂基于LOAM框架的3D激光SLAM:源码剖析到算法优化

(四)彻底搞懂视觉-惯性SLAM:VINS-Fusion原理精讲与源码剖析


深度估计系列

3D目标检测系列

相机模型与标定系列

四旋翼无人机系列

缺陷检测系列
大专栏系列
(一)自动驾驶全栈学习大专栏
主要包括:
《面向自动驾驶领域的多传感器融合系统学习课程》
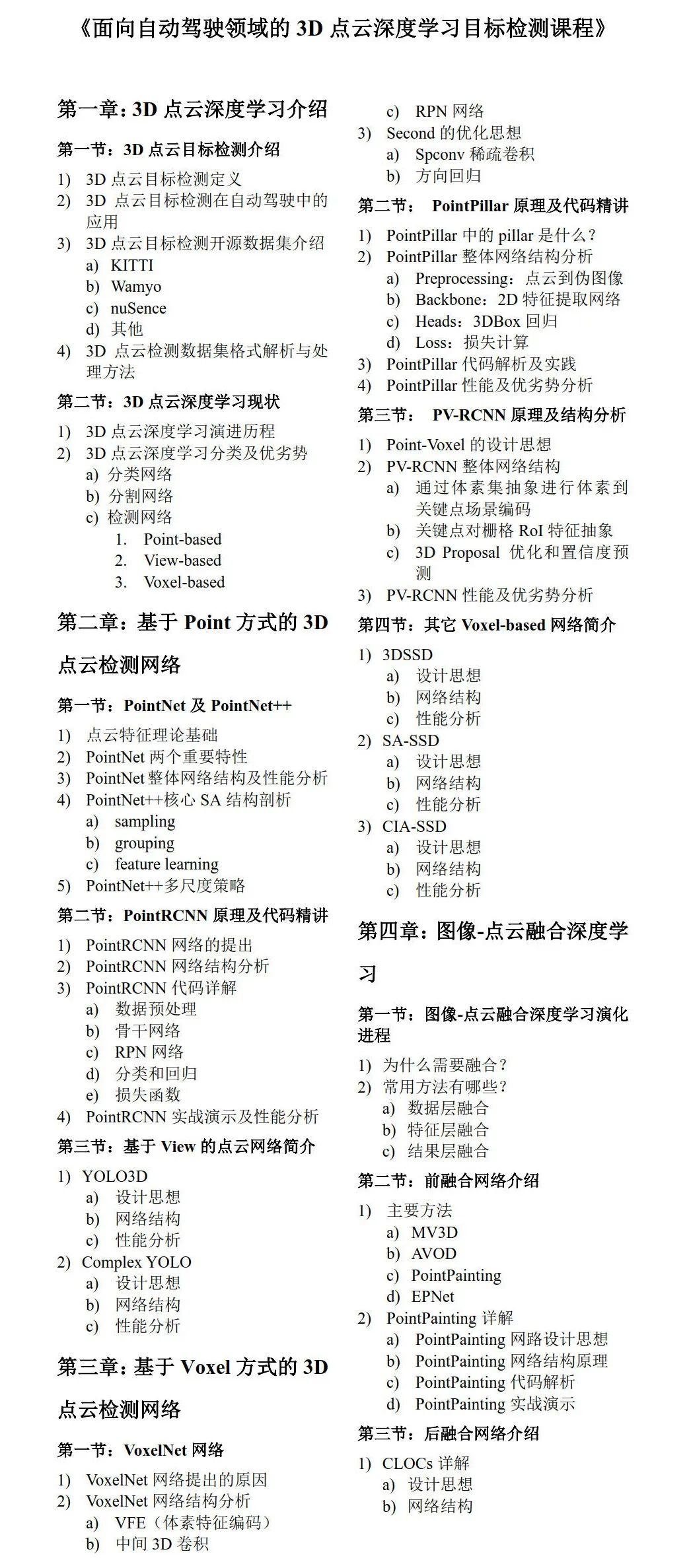
《面向自动驾驶领域的3D点云目标检测课程》
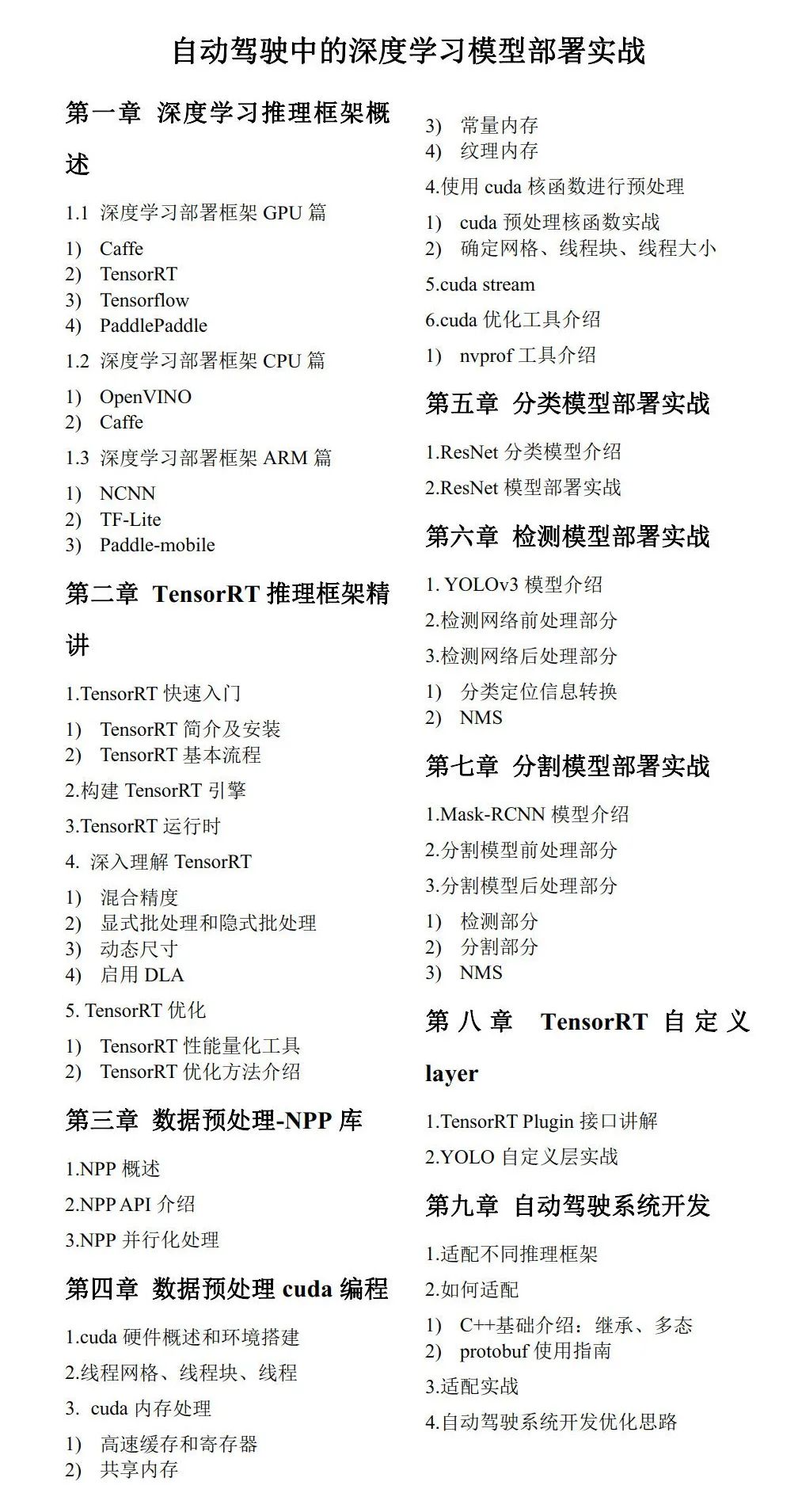
《自动驾驶中的深度学习模型部署实战》
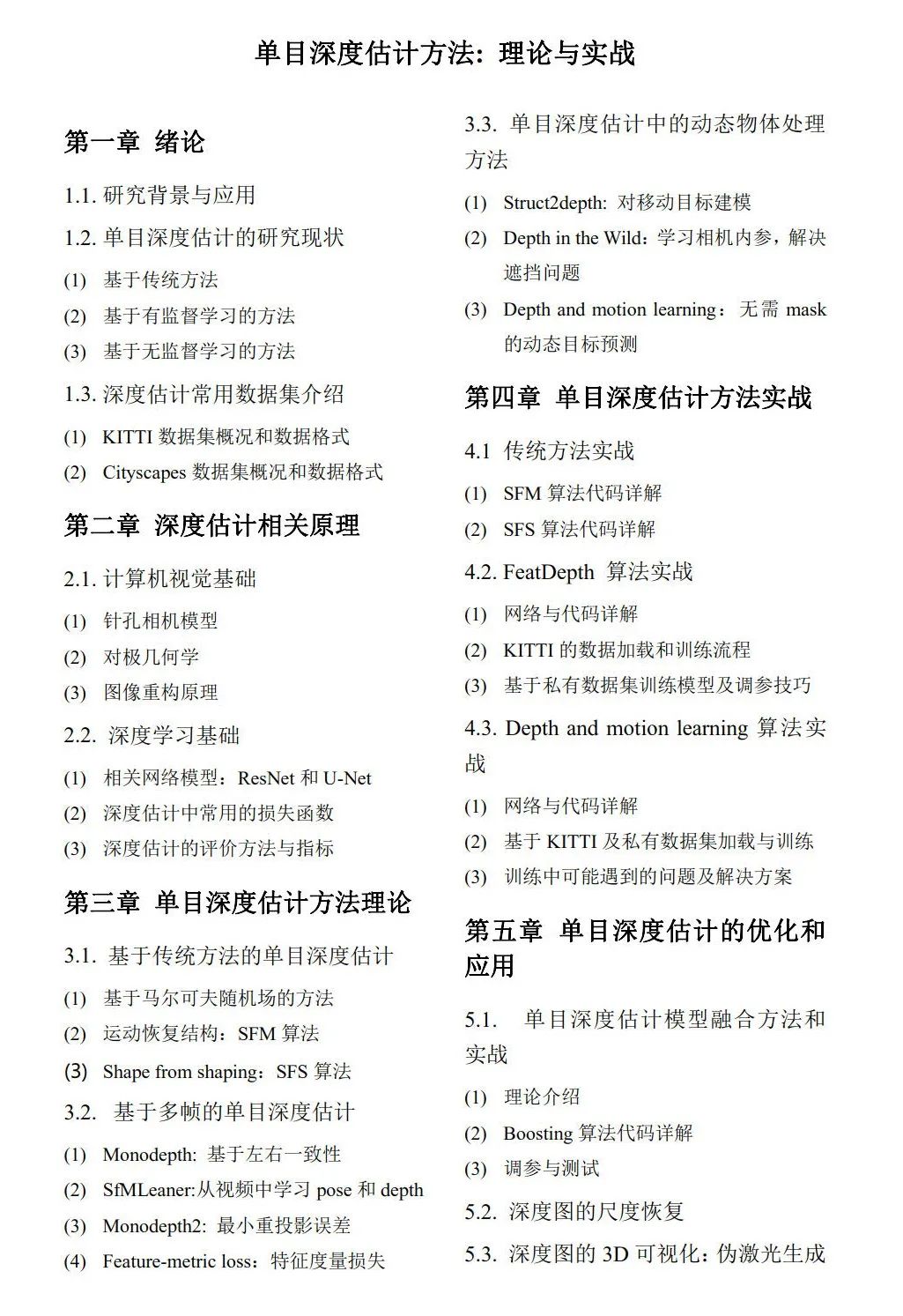
《单目深度估计方法: 理论与实战》
基本涵盖所有自动驾驶场景中的感知、融合、部署任务,适合在校研究生、想要从事自动驾驶相关工作的在职人员。
(二)三维点云全栈学习大专栏
主要包括:
《国内首个面向工业级实战的点云处理课程》
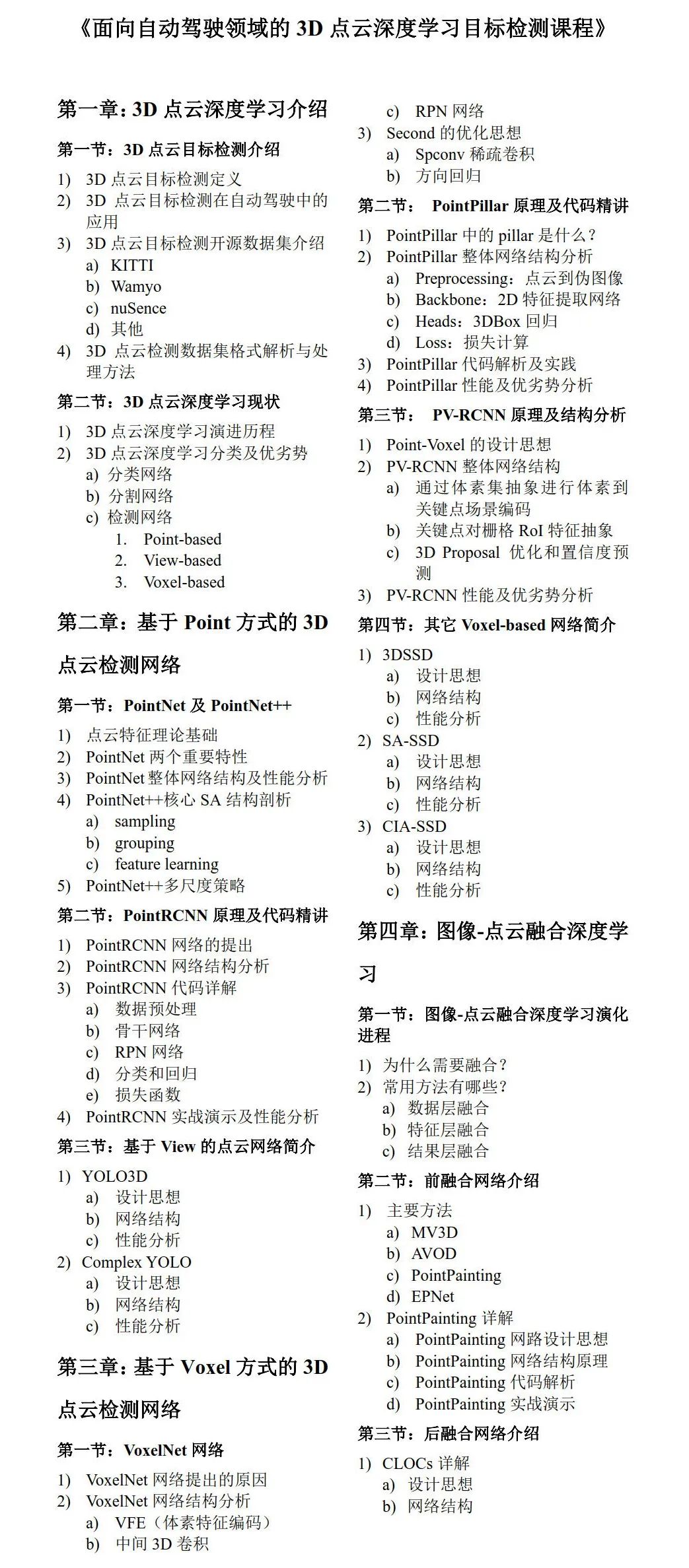
《面向自动驾驶领域的3D点云深度学习目标检测课程》
从传统点云处理方法到深度学习点云方法全方面剖析,适合从事点云相关工作的研究生、算法开发人员。
(三)SLAM全栈学习系统教程
包括《国内首个面向自动驾驶领域的多传感器融合系统学习课程》和以上的所有SLAM课程,非常全面的SLAM学习资料!
(四) 三维重建全栈学习教程
主要包括视觉三维重建、结构光三维重建、点云处理、深度估计等多个课程,从重建方法、软硬件搭建、后处理等多个维度展开介绍,完整的三维重建学习资料!
(五) 三维视觉全栈学习教程
该专栏包括以上三维重建、点云处理、SLAM、相机模型与标定等所有课程!
详细介绍可以扫描以下二维码了解!

▲扫描二维码领券,全部课程享受9折优惠!(9.10~9.12)

群号:450735205
▲课程咨询QQ,了解课程详情

▲长按加客服微信,咨询课程或开票


