作者丨ncepu_Chen@CSDN
来源丨https://blog.csdn.net/ncepu_Chen/article/details/116784462?spm=1001.2014.3001.5502
编辑丨3D视觉工坊
运行官方Demo
以TUM数据集为例,运行Demo的命令:
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml PATH_TO_SEQUENCE_FOLDER ASSOCIATIONS_FILE
rgbd_tum.cc的源码:
int main(int argc, char **argv) {
// 判断输入参数个数
if (argc != 5) {
cerr << endl << "Usage: ./rgbd_tum path_to_vocabulary path_to_settings path_to_sequence path_to_association" << endl;
return 1;
}
// step1. 读取图片及左右目关联信息
vectorvstrImageFilenamesRGB;
vectorvstrImageFilenamesD;
vectorvTimestamps;
string strAssociationFilename = string(argv[4]);
LoadImages(strAssociationFilename, vstrImageFilenamesRGB, vstrImageFilenamesD, vTimestamps);
// step2. 检查图片文件及输入文件的一致性
int nImages = vstrImageFilenamesRGB.size();
if (vstrImageFilenamesRGB.empty()) {
cerr << endl << "No images found in provided path." << endl;
return 1;
} else if (vstrImageFilenamesD.size() != vstrImageFilenamesRGB.size()) {
cerr << endl << "Different number of images for rgb and depth." << endl;
return 1;
}
// step3. 创建SLAM对象,它是一个 ORB_SLAM2::System 类型变量
ORB_SLAM2::System SLAM(argv[1], argv[2], ORB_SLAM2::System::RGBD, true);
vectorvTimesTrack;
vTimesTrack.resize(nImages);
cv::Mat imRGB, imD;
// step4. 遍历图片,进行SLAM
for (int ni = 0; ni < nImages; ni++) {
// step4.1. 读取图片
imRGB = cv::imread(string(argv[3]) + "/" + vstrImageFilenamesRGB[ni], CV_LOAD_IMAGE_UNCHANGED);
imD = cv::imread(string(argv[3]) + "/" + vstrImageFilenamesD[ni], CV_LOAD_IMAGE_UNCHANGED);
double tframe = vTimestamps[ni];
// step4.2. 进行SLAM
SLAM.TrackRGBD(imRGB, imD, tframe);
// step4.3. 加载下一张图片
double T = 0;
if (ni < nImages - 1)
T = vTimestamps[ni + 1] - tframe;
else if (ni > 0)
T = tframe - vTimestamps[ni - 1];
if (ttrack < T)
usleep((T - ttrack) * 1e6);
}
// step5. 停止SLAM
SLAM.Shutdown();
}
运行程序rgbd_tum时传入了一个重要的配置文件TUM1.yaml,其中保存了相机参数和ORB特征提取参数:
%YAML:1.0 ## 相机参数 Camera.fx: 517.306408 Camera.fy: 516.469215 Camera.cx: 318.643040 Camera.cy: 255.313989 Camera.k1: 0.262383 Camera.k2: -0.953104 Camera.p1: -0.005358 Camera.p2: 0.002628 Camera.k3: 1.163314 Camera.width: 640 Camera.height: 480 Camera.fps: 30.0 # Camera frames per second Camera.bf: 40.0# IR projector baseline times fx (aprox.) Camera.RGB: 1# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale) ThDepth: 40.0# Close/Far threshold. Baseline times. DepthMapFactor: 5000.0# Deptmap values factor ## ORB特征提取参数 ORBextractor.nFeatures: 1000# ORB Extractor: Number of features per image ORBextractor.scaleFactor: 1.2# ORB Extractor: Scale factor between levels in the scale pyramid ORBextractor.nLevels: 8# ORB Extractor: Number of levels in the scale pyramid ORBextractor.iniThFAST: 20 ORBextractor.minThFAST: 7
阅读代码之前你应该知道的事情
变量命名规则
ORB-SLAM2中的变量遵循一套命名规则:
1、变量名的第一个字母为m表示该变量为某类的成员变量.
2、变量名的第一、二个字母表示数据类型:
·p表示指针类型
·n表示int类型
·b表示bool类型
·s表示std::set类型
·v表示std::vector类型
·l表示std::list类型
·KF表示KeyFrame类型
这种将变量类型写进变量名的命名方法叫做匈牙利命名法.
理解多线程
为什么要使用多线程?
1、加快运算速度:
bool Initializer::Initialize(const Frame &CurrentFrame) {
// ...
thread threadH(&Initializer::FindHomography, this, ref(vbMatchesInliersH), ref(SH), ref(H));
thread threadF(&Initializer::FindFundamental, this, ref(vbMatchesInliersF), ref(SF), ref(F));
// ...
}
2、开两个线程同时计算两个矩阵,在多核处理器上会加快运算速度.
因为系统的随机性,各步骤的运行顺序是不确定的.
Tracking线程不产生关键帧时,LocalMapping和LoopClosing线程基本上处于空转的状态.
而Tracking线程产生关键帧的频率和时机不是固定的,因此需要3个线程同时运行,LocalMapping和LoopClosing线程不断循环查询Tracking线程是否产生关键帧,产生了的话就处理.

// Tracking线程主函数
void Tracking::Track() {
// 进行跟踪
// ...
// 若跟踪成功,根据条件判定是否产生关键帧
if (NeedNewKeyFrame())
// 产生关键帧并将关键帧传给LocalMapping线程
KeyFrame *pKF = new KeyFrame(mCurrentFrame, mpMap, mpKeyFrameDB);
mpLocalMapper->InsertKeyFrame(pKF);
}
// LocalMapping线程主函数
void LocalMapping::Run() {
// 死循环
while (1) {
// 判断是否接收到关键帧
if (CheckNewKeyFrames()) {
// 处理关键帧
// ...
// 将关键帧传给LoopClosing线程
mpLoopCloser->InsertKeyFrame(mpCurrentKeyFrame);
}
// 线程暂停3毫秒,3毫秒结束后再从while(1)循环首部运行
std::this_thread::sleep_for(std::chrono::milliseconds(3));
}
}
// LoopClosing线程主函数
void LoopClosing::Run() {
// 死循环
while (1) {
// 判断是否接收到关键帧
if (CheckNewKeyFrames()) {
// 处理关键帧
// ...
}
// 查看是否有外部线程请求复位当前线程
ResetIfRequested();
// 线程暂停5毫秒,5毫秒结束后再从while(1)循环首部运行
std::this_thread::sleep_for(std::chrono::milliseconds(5));
}
}
多线程中的锁
为防止多个线程同时操作同一变量造成混乱,引入锁机制:
将成员函数本身设为私有变量(private或protected),并在操作它们的公有函数内加锁.
class KeyFrame {
protected:
KeyFrame* mpParent;
public:
void KeyFrame::ChangeParent(KeyFrame *pKF) {
unique_locklockCon(mMutexConnections);// 加锁
mpParent = pKF;
pKF->AddChild(this);
}
KeyFrame *KeyFrame::GetParent() {
unique_locklockCon(mMutexConnections);// 加锁
return mpParent;
}
}
一把锁在某个时刻只有一个线程能够拿到,如果程序执行到某个需要锁的位置,但是锁被别的线程拿着不释放的话,当前线程就会暂停下来;直到其它线程释放了这个锁,当前线程才能拿走锁并继续向下执行.
备注:感谢微信公众号「3D视觉工坊」整理。
什么时候加锁和释放锁?
unique_locklockCon(mMutexConnections);这句话就是加锁,锁的有效性仅限于大括号{}之内,也就是说,程序运行出大括号之后就释放锁了.因此可以看到有一些代码中加上了看似莫名其妙的大括号.
void KeyFrame::EraseConnection(KeyFrame *pKF) {
// 第一部分加锁
{
unique_locklock(mMutexConnections);
if (mConnectedKeyFrameWeights.count(pKF)) {
mConnectedKeyFrameWeights.erase(pKF);
bUpdate = true;
}
}// 程序运行到这里就释放锁,后面的操作不需要抢到锁就能执行
UpdateBestCovisibles();
}
SLAM主类System
System类是ORB-SLAM2系统的主类,先分析其主要的成员函数和成员变量:

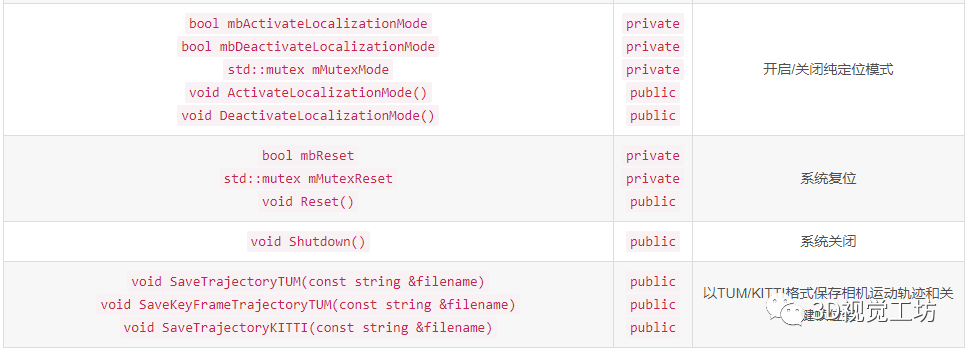
构造函数
System(const string &strVocFile, string &strSettingsFile, const eSensor sensor, const bool bUseViewer=true): 构造函数
System::System(const string &strVocFile, const string &strSettingsFile, const eSensor sensor, const bool bUseViewer) :
mSensor(sensor), mpViewer(static_cast(NULL)), mbReset(false), mbActivateLocalizationMode(false), mbDeactivateLocalizationMode(false) {
// step1. 初始化各成员变量
// step1.1. 读取配置文件信息
cv::FileStorage fsSettings(strSettingsFile.c_str(), cv::FileStorage::READ);
// step1.2. 创建ORB词袋
mpVocabulary = new ORBVocabulary();
// step1.3. 创建关键帧数据库,主要保存ORB描述子倒排索引(即根据描述子查找拥有该描述子的关键帧)
mpKeyFrameDatabase = new KeyFrameDatabase(*mpVocabulary);
// step1.4. 创建地图
mpMap = new Map();
// step2. 创建3大线程: Tracking、LocalMapping和LoopClosing
// step2.1. 主线程就是Tracking线程,只需创建Tracking对象即可
mpTracker = new Tracking(this, mpVocabulary, mpFrameDrawer, mpMapDrawer, mpMap, mpKeyFrameDatabase, strSettingsFile, mSensor);
// step2.2. 创建LocalMapping线程及mpLocalMapper
mpLocalMapper = new LocalMapping(mpMap, mSensor==MONOCULAR);
mptLocalMapping = new thread(&ORB_SLAM2::LocalMapping::Run, mpLocalMapper);
// step2.3. 创建LoopClosing线程及mpLoopCloser
mpLoopCloser = new LoopClosing(mpMap, mpKeyFrameDatabase, mpVocabulary, mSensor!=MONOCULAR);
mptLoopClosing = new thread(&ORB_SLAM2::LoopClosing::Run, mpLoopCloser);
// step3. 设置线程间通信
mpTracker->SetLocalMapper(mpLocalMapper);
mpTracker->SetLoopClosing(mpLoopCloser);
mpLocalMapper->SetTracker(mpTracker);
mpLocalMapper->SetLoopCloser(mpLoopCloser);
mpLoopCloser->SetTracker(mpTracker);
mpLoopCloser->SetLocalMapper(mpLocalMapper);
}
LocalMapping和LoopClosing线程在System类中有对应的std::thread线程成员变量,为什么Tracking线程没有对应的std::thread成员变量?
因为Tracking线程就是主线程,而LocalMapping和LoopClosing线程是其子线程,主线程通过持有两个子线程的指针(mptLocalMapping和mptLoopClosing)控制子线程.
(ps: 虽然在编程实现上三大主要线程构成父子关系,但逻辑上我们认为这三者是并发的,不存在谁控制谁的问题).
跟踪函数System对象所在的主线程就是跟踪线程,针对不同的传感器类型有3个用于跟踪的函数,其内部实现就是调用成员变量mpTracker的GrabImageMonocular(GrabImageStereo或GrabImageRGBD)方法.

传感器类型用于跟踪的成员函数
cv::Mat System::TrackMonocular(const cv::Mat &im, const double ×tamp) {
cv::Mat Tcw = mpTracker->GrabImageMonocular(im, timestamp);
unique_locklock(mMutexState);
mTrackingState = mpTracker->mState;
mTrackedMapPoints = mpTracker->mCurrentFrame.mvpMapPoints;
mTrackedKeyPointsUn = mpTracker->mCurrentFrame.mvKeysUn;
return Tcw;
}
本文仅做学术分享,如有侵权,请联系删文。
干货下载与学习
后台回复:巴塞罗那自治大学课件,即可下载国外大学沉淀数年3D Vison精品课件
后台回复:计算机视觉书籍,即可下载3D视觉领域经典书籍pdf
后台回复:3D视觉课程,即可学习3D视觉领域精品课程
3D视觉工坊精品课程官网:3dcver.com
1.面向自动驾驶领域的多传感器数据融合技术
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码) 3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进 4.国内首个面向工业级实战的点云处理课程 5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解 6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦 7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化 8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
9.从零搭建一套结构光3D重建系统[理论+源码+实践]
10.单目深度估计方法:算法梳理与代码实现
11.自动驾驶中的深度学习模型部署实战
12.相机模型与标定(单目+双目+鱼眼)
13.重磅!四旋翼飞行器:算法与实战
14.ROS2从入门到精通:理论与实战
15.国内首个3D缺陷检测教程:理论、源码与实战
16.基于Open3D的点云处理入门与实战教程
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。
▲长按加微信群或投稿,加微信:dddvision
▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近6000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~


